Дипломная работа: Анализ и моделирование методов когерентной оптики в медицине и биологии
Дипломная работа: Анализ и моделирование методов когерентной оптики в медицине и биологии
Введение
Когерентная оптика может выполнять два типа операции в биологии и медицине. Во-первых, она может производить операции, которые можно осуществлять и другими способами. Ее можно использовать для обработки данных, распознавания патологических тканей или обнаружения движения объекта. Разумеется, не все, что может быть сделано средствами когерентной оптики, должно быть выполнено с ее помощью. Трудности заключаются в демонстрации преимуществ когерентной оптики перед некогерентной (которая часто дешевле, удобнее и более естественна) или перед цифровыми методами. Когерентная оптика будет целесообразной только там, где необходимость ее использования достоверно установлена. Во-вторых, когерентная оптика может производить операции, которые нельзя осуществить другими методами, например голографическое формирование изображений и обнаружение малых смещений с помощью голографии. Проблема в этом случае состоит в том, чтобы показать, что такие операции нужны.
При переходе от идеи к общепринятому практическому использованию любое применение когерентной оптики должно проходить три стадии. Мы назовем эти стадии как «доказательство», «техника» и «внедрение». На первой стадии мы должны выяснить не то, «может ли данная процедура быть выполнена посредством когерентной оптики», а «должна ли эта процедура выполняться с помощью когерентной оптики». При этом в свою очередь встают два вопроса. Первый: «Действительно ли предлагаемую операцию стоит выполнять?» и второй: «Является ли когерентная оптика наилучшим средством для этого?». До тех пор пока операция не является действительно необходимой, она не будет иметь значительного успеха. Действительно ли медицина нуждается в записи трехмерных изображений людей? Если нет, то голографическое формирование изображений тела не будет успешным. Даже в том случае, если и необходима операция, когерентная оптика может являться всего лишь одним из способов ее выполнения. В случае обработки трансаксиальных томографических изображений альтернативными подходами, заслуживающими внимания, представляются цифровые методы и некогерентиая оптическая обработка. Когерентная оптика должна доказать, что она является лучшим (по какому-либо критерию) способом. Если когерентный оптический метод проходит оба теста на стадии доказательства, он может перейти в техническую стадию. Здесь проблема заключается в доведении очень сложной когерентной оптической системы до уровня падежного прибора, управлять которым можно без специального знания когерентной оптики. Третья стадия является последним препятствием и самым сложным, так как здесь появляются многие нетехнические моменты.
Подавляющее большинство методов когерентной оптики находится на первой стадии. Это не означает, что они не приведут к окончательному признанию. Разумеется, некоторые приведут, а некоторые нет. В настоящей главе делается попытка дать обзор различных применений, исследованных в последнее время.
Мы начнем с наиболее очевидных применений и постепенно будем переходить к менее очевидным. Таким образом, мы начинаем с рассмотрения формирования когерентного оптического изображения (микроскопического и макроскопического, трехмерного и двумерного) и перейдем к формированию неоптического изображения с использованием когерентного света (в акустике и радиологии). Так как очень многое здесь включает формирование трехмерного изображения и различные формы томографии, то в конце главы дается приложение, связывающее все эти понятия.
Следующей областью нашего исследования будет обработка сигналов, которая включает улучшение изображения и обработку данных, полученных другими средствами, например электрокардиограмм, электроэнцефалограмм. Затем мы рассмотрим представление изображений — чрезвычайно важное использование когерентной оптики. Когерентную оптику можно использовать также для выделения или воспроизведения некоторых характеристик объекта (размеров, контуров, движения и т.д.), этому посвящен один раздел. Последним из рассматриваемых применений является распознавание образов. Здесь имеется очень большой материал, так что для получения общего представления деталями придется пренебречь.
1. Формирование оптического изображения в когерентном свете
Биология и медицина предполагают исследование объектов, которые можно изучать в течение длительного промежутка времени. В случае если объект не удобен для хранения, мы стремимся записать его изображение в виде, удобном для хранения. В этом смысле особенно целесообразными оказываются когерентные оптические методы. Приложение, посвященное формированию трехмерных изображений и томографии, будет особенно полезным после прочтения всего раздела по формированию когерентного оптического изображения.
1.1 Формирование изображения в оптическом микроскопе
Микроскопия издавна имела глубокое влияние на развитие медицины и биологии. Не удивительно, что именно микроскопия привела Аббэ [1.1] в 1873 г. к когерентной обработке оптических изображений и Габора [1.2] в 1948 г. к голографии. Использование фазовой модуляции в микроскопии известно настолько хорошо и развивается так быстро, что это могло бы потребовать полной обзорной главы. В биомедицинскую практику только в настоящее время внедряются разработки, вытекающие прямо или косвенно из габоровского метода восстановления волновых фронтов. Остановимся подробнее на этом вопросе.
Голография может иметь связь с микроскопией в трех аспектах. Во-первых, она может быть способом микроскопии. Во-вторых, она может быть вспомогательным средством в обычной микроскопии, обеспечивающим стационарную копию быстро изменяющегося оптического объекта для последующего исследования. В-третьих, ее можно сочетать с обычной микроскопией с целью образования гибридной системы с вытекающими отсюда преимуществами, характерными для каждой из них.
Микроскопия средствами голографии была впервые описана Габором [1.2], который предложил запись волнового фронта в невидимой (коротковолновой) части спектра и восстановление его более длинными (видимыми) волнами. Таким образом, сформированные изображения должны были бы иметь поперечное увеличение, равное отношению длин волн. Позднее Лейт и Упатниекс [1.3] уточнили, что этот вид голографическон микроскопии является только одним из примеров общего положения, когда запись волнового фронта происходит при одних условиях (длина волны, положение опорного точечного источника и т.д.), а восстановление его — при других. Таким образом, варьируя геометрические параметры схемы при записи и восстановлении, можно контролировать и менять увеличение изображения, даже если на обоих этапах используется свет одной длины волны.
Микроскопия голографически зарегистрированных волновых фронтов является привлекательной идеей с многих точек зрения. Объект может меняться так быстро, что медленное исследование средствами обычной микроскопии затруднено или вообще невозможно. В таких случаях голография необходима. Изображение может быть изучено любым известным микроскопическим методом (светлое поле, темное поле, фазовый контраст, интерференция и т.д.), удобным для исследователя. Выбор метода можно сделать a posteriori.
Обычная микроскопия встречается с некоторыми трудностями, которые можно уменьшить, воспользовавшись голографией. Например, неудовлетворительная коррекция линз в обычной микроскопии лимитирует качество изображения. В голографии можно скорректировать любые недостатки линз, если они известны. Таким образом, голографию можно использовать для получения дифракционно-ограниченных изображений при больших относительных отверстиях и низкокачественных объективах микроскопа. Одним из способов достижения этого является использование голограммы в качестве корректирующего элемента для превращения реального импульсного отклика объектива в необходимый. Другой способ [1.4] состоит в пропускании восстановленного волнового фронта обратно через линзу низкого качества с целью формирования неувеличенпого дифракционно-ограниченного изображения объекта для последующего исследования с помощью обычных микроскопов с лучшими объективами.
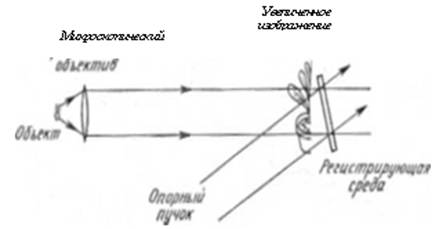
Рис. 1.1. Схема голографической записи увеличенного изображения
Рассмотрев эти три области голографической микроскопии достаточно глубоко, чтобы увидеть их цели и взаимосвязи, обратимся теперь к нескольким иллюстрирующим примерам.
Каким образом записываются объекты голографически для последующего микроскопического изучения? Ответ на этот вопрос будет: «Любым способом, при котором можно зарегистрировать объект при достаточно большом относительном отверстии для получения, требуемого разрешения». Это не всегда легко сделать. Использовались два подхода.
В первом подходе записывались голограммы изображений, сформированных объективами микроскопов с большим относительным отверстием. Это несколько облегчает получение голограммы с требуемым относительным отверстием. Чтобы записать изображение с высоким разрешением, мы должны видеть объект под широким углом, или, что- то же самое, использовать систему с большим относительным отверстием. Тогда поперечное разрешение равняется приблизительно Nл, где л — длина волны света, формирующего изображение. В таком случае достижение высокого разрешения влечет за собой требование большой величины относительного отверстия. Это положение иллюстрируется рис. 1.1. Восстановленный волновой фронт можно наблюдать при помощи обыкновенного окуляра, если восстанавливающий пучок повторяет в точности опорный пучок. Если восстанавливающий пучок имеет обратное направление, восстановленный фронт можно наблюдать, пропуская пучок обратно через объектив для автоматической коррекции. Автоматическая коррекция имеет место также в случае, если вместо обычного объекта регистрируется точечный объект. Таким образом, сформированная голограмма превращает каждую отдельную точку объекта в копию референтной точки. В этом случае результирующее изображение образуется из более резких, а не размытых точек. Все эти методы успешно использовались в топографических лабораториях. Одним из наиболее занимательных применений являлась киноголографическая микроскопия [1.5], когда голографический кинофильм снимался через микроскопический объектив. Так как регулировку фокусировки можно осуществлять a posteriori, имеется возможность наблюдать за объектами, которые обычно выходят из фокуса. Действительно, возможность перефокусировки дает трехмерную информацию о положении объекта. Рис. 1.2 иллюстрирует некоторые преимущества киноголографической микроскопии: мы можем иметь как большую скорость кадров, так и время для коррекции фокуса в каждом кадре, так как фокусировку можно произвести на этапе восстановления изображения.
Во втором подходе используется безлинзовое формирование изображения при большом относительном отверстии. Это означает, что объект должен находиться настолько близко к голографической записывающей среде, чтобы необходимый участок регистрирующей среды получал информацию от любой части объекта. Это в свою очередь влечет за собой проблемы, связанные с установкой опорного и освещающего объект пучков, а также с положением регистрирующей среды. Было предложено много методов для достижения этого. На рис. 1.3 показано, как записывают нормальные голограммы объектов. Проблемы, связанные с приближением записывающей среды к объекту, не просты. На рис. 1.4 показано, каким образом объектный и опорный пучки (но не освещающий пучок) могут падать на записывающую среду даже в случае, если объект и записывающая среда находятся на одной оси. Ясно, что обычное расположение (рис. 1.3) не может быть использовано для получения желаемого результата, так как нет возможности осветить объект или ввести опорный пучок. Макмахоном и Колфилдом было предложено несколько решений этой проблемы [1.6].
Другой, еще более простой метод был разработан Томпсоном и др. [1.7] для исследования микроструктуры капель тумана, однако его можно использовать и в случае биологических объектов. Луч от импульсного лазера падает на частицы вблизи фотографической пластинки. Дифрагированный свет от частиц интерферирует с недифрагированным светом, образуя голограмму. В этом случае, так же как и при оригинальной габоровской голограмме [1.2], на стадии восстановления наблюдались три перекрывающихся волновых фронта, соответствующих непродифрагированному восстанавливающему лучу, мнимому изображению объекта и действительному изображению объекта. Часто одно из этих изображений совпадало с расфокусированным изображением другого (с сопряженным изображением).
Томпсон и др. показали, что при коллимированиом опорном и восстанавливающем пучках и голограмме, находящейся в дальней области, одно изображение можно удалить на бесконечность, т.е. наблюдать так далеко от фокуса, что оно будет пренебрежимой помехой при наблюдении другого изображения. За одну экспозицию лазерным импульсом записывают формы и положения всех частиц вблизи записывающей среды. По чисто техническим причинам (см. приложение) мы не можем наблюдать все частицы одновременно. Однако мы можем исследовать их по сечениям. При воспроизведении наблюдаются изображения частиц как в фокусе, так и вне его. Передвигая экран для наблюдения или видикоп на различные расстояния от голограммы, мы можем наблюдать, как изображения входят и выходят из фокуса. Изображение находится в фокусе, когда его размеры и окружности вокруг него минимальны.
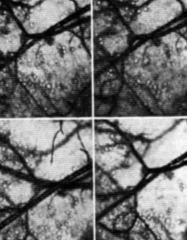
Рис. 1.2.
Фотографии изображений, восстановленных с одного кадра микрокиноголограммы. Показана различная глубина фокуса, что можно видеть по появлению и исчезновению капилляров из фокуса. Можно видеть пузырьки, проходящие по центральной артерии (С разрешения М. Е. Кокса, Университет Мичиган-Флинт).
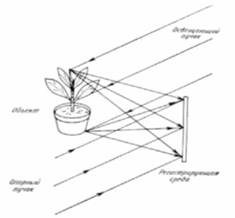
Рисунок 1.3. Обычная схема записи голограмм
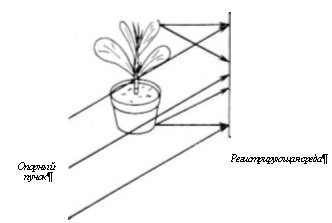
Рис. 1.4 Предпочтительная схема записи голограмм
Было реализовано несколько интересных биомедицинских применений. Один из наиболее наглядных примеров следует из работы Ботнера и Томпсона [1.8] по волокнистым материалам, которые из-за своих размеров не фильтруются нашими дыхательными органами и вследствие этого являются потенциально токсичными. На рис. 1.5,а показана голограмма. Буквы Л, В, С указывают местоположения в плоскости х—у трех частиц, находящихся на различных глубинах. На вставках б, в и г показаны сами частицы в плоскостях наилучшей фокусировки. Таким образом, рис. 1.5 демонстрирует, как осуществляется голографический анализ микрочастиц. Каждая дифракционная картина на голограмме есть указатель частицы, находящейся на одной оси с опорным пучком в момент излучения импульса лазера. Освещая эту картину (голограмму отдельной частицы) копией опорного пучка, только противоположно направленной, мы формируем точное действительное изображение частицы (подверженное дифракционным ограничениям, накладываемым размером голограммы, размером частицы и расстоянием частицы от пластинки). Если бы объектом была математическая точка на расстоянии d от записывающей среды, ее голограмма была бы похожа на френелевскую зонную пластинку с фокусным расстоянием d.
Таким образом, имеем концентрические кольца с радиусом:
![]()
![]() ,
,
где п — целое число, а л — длина волны лазера.


Рис. 1.5. Голограмма Фраунгофера (а) волокнистых частиц и изображения отдельных частиц (б, в, г), восстановленные с участков голограммы А, В, и С соответственно (С согласия Ботнера и Томпсона [1.8]).
Эффективный диаметр Dэфф голограммы ограничен из-за того, что при некотором п расстояние между соседними кольцами становится слишком маленьким для разрешения. При восстановлении поперечное разрешение ограничивается дифракцией:
![]() .
.
Для практических целей можно разрешить детали, сравнимые с л. Можно
обнаружить меньшие частицы, но нельзя определить их форму. Изображениями их являются
просто кольца диаметром ![]() . К сожалению, изображение выходит из фокуса таким образом, что на
глубинах, отличных от d, мы все еще наблюдаем создаваемую частицей картину. Мы знаем, что находимся
на нужной глубине, если изображение имеет минимальный размер и, в идеале, не
имеет структуры концентрических колец. Таким образом, передвигают проекционный
экран или видикон на различные расстояния с тем, чтобы найти истинное значение d.
Такая операция может быть легко автоматизирована. Все
эти методы требуют лазерного освещения, а оно приводит к специфическому эффекту
лазерных спеклов (зернистой структуры лазерного освещения). Природа лазерных спеклов
и возможности борьбы с ними широко исследовались в течение многих лет, и
существует много «решений» (значительно различающихся по сложности и
практичности) [1.9, 10]. Многие из этих решений пригодны только в особых
случаях, для которых они были разработаны, и ни одно из них не является
универсальным средством подавления спеклов. Возможно, эти вездесущие пятнышки
являются первичным барьером на пути более широкого применения голографической
микроскопии. На рис. 1.6 показано изображение спеклов до и после операции их
подавления. В данном случае спеклы были устранены (минимизированы) просто с
помощью формирования изображения при большой числовой апертуре. Обычно размеры
спеклов дифракционно-ограничены, они становятся меньше по мере увеличения
числовой апертуры.
. К сожалению, изображение выходит из фокуса таким образом, что на
глубинах, отличных от d, мы все еще наблюдаем создаваемую частицей картину. Мы знаем, что находимся
на нужной глубине, если изображение имеет минимальный размер и, в идеале, не
имеет структуры концентрических колец. Таким образом, передвигают проекционный
экран или видикон на различные расстояния с тем, чтобы найти истинное значение d.
Такая операция может быть легко автоматизирована. Все
эти методы требуют лазерного освещения, а оно приводит к специфическому эффекту
лазерных спеклов (зернистой структуры лазерного освещения). Природа лазерных спеклов
и возможности борьбы с ними широко исследовались в течение многих лет, и
существует много «решений» (значительно различающихся по сложности и
практичности) [1.9, 10]. Многие из этих решений пригодны только в особых
случаях, для которых они были разработаны, и ни одно из них не является
универсальным средством подавления спеклов. Возможно, эти вездесущие пятнышки
являются первичным барьером на пути более широкого применения голографической
микроскопии. На рис. 1.6 показано изображение спеклов до и после операции их
подавления. В данном случае спеклы были устранены (минимизированы) просто с
помощью формирования изображения при большой числовой апертуре. Обычно размеры
спеклов дифракционно-ограничены, они становятся меньше по мере увеличения
числовой апертуры.
1.2 Формирование трехмерного оптического макроскопического
изображения
Для нас, людей, наиболее интересными являются макроскопические биологические объекты, а именно мы сами и наши важнейшие «составные части». Мы хотим получать изображения и производить измерения. Когерентная оптика все это выполняет.

Рис. 1.6. Одно и то же изображение со спеклами и без спеклов.
Измерения можно отделить от формирования изображений. В этом разделе мы будем иметь дело исключительно с формированием оптических изображений средствами когерентной оптики. В качестве конкурента здесь выступает обыкновенная фотография.
Голография является очевидным подходом к решению вопроса о формировании биологического изображения. Гара и др. [1.11] было детально описано устройство для записи и измерения точной трехмерной информации о больших объектах. Голограмма записывалась при помощи обыкновенного импульсного лазера. Для получения трехмерного изображения с точными размерами при восстановлении мы должны использовать ту же длину волны, что и при записи. Причина вполне понятна. Голограмме, подобно линзе, присущи ограничения, связанные с фундаментальными законами дифракции. Так, если R есть отношение длины волны света, используемого при восстановлении, к длине волны записывающего света, то поперечное увеличение системы равно R, но продольное увеличение будет равно R2. Это означает, что оба увеличения равны только в случае, если R = R2 , т.е. R=l. Таким образом, чтобы получить реальное неискаженное изображение, мы должны освещать голограмму восстанавливающим пучком, идентичным опорному пучку во всех отношениях, кроме одного: восстанавливающий луч обратен по направлению. Гара и др. [1.11] производил запись с помощью импульсного лазера, с тем чтобы «заморозить» движение объекта, а затем воспроизводил реальное изображение с помощью лазера, работающего в непрерывном режиме с той же длиной волны.
И, наконец, изображение сканировалось в трех измерениях с целью описания объекта как поверхности, находящейся на расстоянии S(x, у) от плоскости голограммы в каждой точке (x, у) в этой плоскости. Полезность этого метода для формирования изображения всего тела очевидна. Необходимость же иметь такое детализированное изображение всего тела не так очевидна, так что этот мощный инструмент ждет задачи, оправдывающей затраты на него. Пригодность этого метода для биологических задач была продемонстрирована при формировании изображений моделей черепа с последующим выделением профилей. На рис. 1.7 показаны горизонтальные профили модели, сделанные Гара и др. [1.11]. Были сделаны как микрометрические, так и голографические измерения положения меток, нанесенных на череп. Среднеквадратичное значение разницы между указанными координатами равнялось — 40 мкм. Ту же самую задачу по выделению трехмерных координат поверхности для свободно расположенных объектов пытались решить другими, существенно некогерентными методами. Эту задачу можно назвать «стереометрией». Стереометрия не подразумевает классическую стереофотографию или «фотограмметрию*. Скорее, это есть общее название, данное любому методу трехмерного измерения (не обязательно формированию изображений).
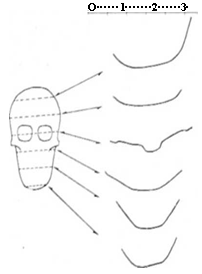
Рис. 1.7. Профили модели черепа, полученные при помощи голографического метода Тара и др. [1.11] (С разрешения исследовательской лаборатории фирмы General Motors Corporation)
Наиболее распространенным видом стереометрии является расчет на ЭВМ или даже когерентно-оптическая расшифровка стереофотографических пар [1.12]. Новый метод, использующий временные задержки для кодирования пространственной информации [1.13], непосредственно выдает стереометрическую информацию о нескольких тысячах точек в секунду. Точность определения глубины этим последним методом (называемым лазерной стереометрией) на порядок хуже точности метода Гара и др., но зато информация поступает в реальном времени и отпадает необходимость в вычислительной машине.
Так как лазерная стереометрия не использует когерентность лазера, мы не будем здесь ее рассматривать. Она упоминается для того, чтобы оставить определенные перспективы п будущем для голографической стереометрии. Это медленный метод, требующий большой осторожности при пользовании им, но с его помощью достигается большая точность, чем в каком-либо другом методе. И снова неголографические методы оказываются почти такими же хорошими и более простыми, чем голографические.
Разумеется, могут быть успешно использованы и менее разработанные голографические методы. Основным преимуществом их оказывается возможность трехмерной записи. Вопрос состоит не в том, что можно сделать, а в том, для чего нужна эта техника. Для чего именно нужна запись с полной трехмерной точностью? Редкий патологический объект? Действия уникально квалифицированного хирурга в редкой операции? Последний почтовый голубь? Что бы это ни было, оно должно быть достаточно редким, чтобы оправдать запись полностью, и достаточно важным, чтобы оправдать трудности голографирования. На сегодня выяснен только один ответ: голография с помощью оптических элементов (линз) становится широко распространенным средством для записи сетчатки и внутренней полости глаза [1.14].
1.3 Формирование двумерного изображения
Несмотря на то, что не существует объектов — биологических или каких-либо других, имеющих строго два измерения, имеются реальные преимущества для записи двумерных изображений в биологии и медицине, так же как и реальные преимущества использования голографии для этих целей. Рассмотрим сначала применения, а потом использование голографии в них.
Существуют две категории интересующих нас двумерных изображений: регистрация символов и изображения объектов. К символическим регистрациям относят диаграммы, графики, печатные страницы и др. Проблемой для биомедицинского исследования здесь является объем информации. Необходим дешевый, компактный, легко доступный, легко копируемый, нечувствительный к повреждениям способ храпения, позволяющий лучшее использование, хранение и обмен необработанных данных. Двумерные изображения обычны, так как они являются самыми легкими для записи и, как правило, самыми простыми для интерпретации. Требования к ним идентичны требованиям к хранению символических изображений плюс дополнительное требование, чтобы большое число градаций было использовано в тоновых изображениях. Так, в случае формирования двумерного изображения голографию следует рассматривать не как прямое средство записи изображения, а как средство архивного хранения изображений, записанных другими способами (например, фотографическим, компьютерным построителем, печатанием па пишущей машинке). Способность легко и просто записывать и воспроизводить данные, низкая стоимость и высокая плотность и нечувствительность к потерям вследствие дефектов должны увеличить полезность всех предпринимаемых сегодня исследовательских усилий.
Голография имеет некоторые ярко выраженные преимущества как метод хранения. Рассмотрим Фурье-голограммы, записанные в какой-либо легкодоступной среде, например на фотографической пленке. Много голограмм полных страниц с данными хранятся рядом друг с другом. Преимущества этого очевидны. Во-первых, проблема фокусировки при записи (очень жесткая при микрофильмировании) просто-напросто исчезает. Так как записан волновой фронт (а не просто изображение), голограмма не может быть не в фокусе.
Во-вторых, проблема фокусировки при воспроизведении (опять же сложная при воспроизведении микрофильма) фактически отсутствует, так как голограмма настолько мала, что каждая деталь проектируется с малым относительным отверстием (и, следовательно, с очень большой глубиной резкости). В-третьих, оборудование при воспроизведении—простое и недорогое, включая Не—Ne-лазер для освещения каждой голограммы, механическую каретку для перемещения пленки так, чтобы выбранная голограмма попадала в пучок, и проекционный экран. В-четвертых, копирование — простое, некритичное и дешевое. В-пятых, запись компактна. Читаемый вариант этой страницы может быть записан на голограмме диаметром 2—3 мм. В-шестых, запись является в некотором смысле неуязвимой к повреждениям и пыли. Информация записана в распределенной форме, так что затемненная часть голограммы приводит лишь к малозаметному ухудшению всего изображения, но она не уничтожает полостью ни одной его детали. Более того, царапины, не параллельные интерференционным полосам голограммы, не влияют на изображение. В-[1.15] можно ознакомиться с деталями этого метода.
2. Неоптические методы формирования изображений
Поскольку отображение тканей в неоптическом и оптическом излучениях различно, целесообразно формировать неоптические изображения. Необходимо, чтобы выходное изображение было видимым, хотя входная информация является невидимой. Когерентная оптика играет важную роль в формировании неоптических изображений. Во-первых, она дает полезные аналогии (например, оптическую голографию), которые без труда распространяются на неоптические области. Во-вторых, она является средством получения требуемых видимых изображений.
2.1 Акустическая голография
Акустическая голография дает хорошие примеры обеих операций в неоптической области, получаемых, но аналогии с когерентной оптикой и использованием когерентного оптического восстановления. Мы подведем итоги некоторых результатов. Для читателей, интересующихся вопросом более детально, существует прекрасная монография [1.16]. Наша цель состоит в том, чтобы подчеркнуть скорее результаты, которые можно получить, а не методы их достижения. Акустические голограммы часто формируются и считываются одновременно. Двумя распространенными голографическими средами являются поверхности жидкости (рябь на поверхности) [1.17] и жидкие кристаллы [1.18]. Также можно использовать явление дифракции Брэгга [1.19]. Во всех этих случаях восстановление в когерентном свете обеспечивает получение изображения объекта в реальном времени в виде, как он «освещается» звуком. Для наблюдения с задержкой (а не в реальном времени) существует также большой выбор регистрирующих сред [1.16].
Изображения содержат информацию об объеме объекта, но эту информацию не так легко воспринять, как глубину сцены в «обычной оптической голографии». Причина этого ясна, и применение когерентной оптики к вопросам биомедицины является важной иллюстрацией более общей проблемы. В случае обычной оптической френелевской голограммы мы наблюдаем сцену сквозь голограмму, линейные размеры которой могут быть 10—20 см. Стандартная пленка записывает 2*104 лин/см, или около 2*105—4*105 интерференционных полос в голограмме в видимом свете.
Таким образом, вся голограмма может содержать около 1011
разрешимых пространственных элементов или элементов изображения. На рис. 2.1. показано,
как можно наблюдать объект через такую оптическую голограмму. Часть всей
голограммы, образующая изображение, наблюдаемое глазом, очень мала, но число
содержащихся элементов изображения может все еще равняться 106 или
больше в зависимости от того, где расположены глаза наблюдателя. Типичные
акустические голограммы далеко не содержат 1011 элементов
изображения. В результате этого их нельзя использовать как оптические
голограммы, которые были только что описаны. Вместо того чтобы наблюдать
трехмерную сцену в большое окно, мы наблюдаем ее в замочную скважину! Без
изменений перспективы, имеющих место при более широкой апертуре, мы теряем
ощущение объема. Мы не можем видеть трехмерную картину в замочную скважину. Это
положение иллюстрируется па рис. 2.2. Итак, мы должны использовать всю
голограмму для создания изображения. Исчезает параллакс, но зато остается
глубина фокусировки при формировании изображения. Поэтому можно осуществлять
фокусировку на последовательные плоскости с обычной глубиной фокусировки,
которая имеет место в случае получения обычного акустического изображения. Это
значит, что голограмма с апертурой А,
рассматривающая объект на расстоянии d при длине
акустической волны л, имеет разрешение по глубине примерно ![]() . Часто различные
«плоскости» фокусируются последовательно на видикон для удобства телевизионного
считывания. Общей проблемой, показанной здесь, является относительная
малочисленность данных, обычно встречающаяся в биомедицинских изображениях.
Таким образом, если бы были доступны удобные и быстрые матрицы преобразователей
в 103*103 элементов, то они могли бы заменить
непосредственно формируемые голограммы, а изображения могли бы формироваться не
при помощи дифракции, а с помощью машинного преобразования Френеля. В
акустической голографии когерентная оптика используется не вследствие своих
сильных качеств (высокая скорость обработки данных), а просто потому, что она
является (в настоящее время) более дешевой и удобной.
. Часто различные
«плоскости» фокусируются последовательно на видикон для удобства телевизионного
считывания. Общей проблемой, показанной здесь, является относительная
малочисленность данных, обычно встречающаяся в биомедицинских изображениях.
Таким образом, если бы были доступны удобные и быстрые матрицы преобразователей
в 103*103 элементов, то они могли бы заменить
непосредственно формируемые голограммы, а изображения могли бы формироваться не
при помощи дифракции, а с помощью машинного преобразования Френеля. В
акустической голографии когерентная оптика используется не вследствие своих
сильных качеств (высокая скорость обработки данных), а просто потому, что она
является (в настоящее время) более дешевой и удобной.
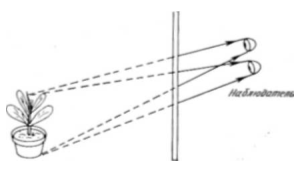
Рис. 2.1. Наблюдение изображения с обычной оптической голограммы

Рис. 2.2. Наблюдение изображения с голограммы небольшого размера, например, акустической.
Такое удачное стечение обстоятельств действительно имеет место в случае с когерентной оптикой, но оно не приводит к стабильному преимуществу. Цифровые матричные преобразователи и цифровые процессоры станут более дешевыми и более быстрыми. Для того чтобы сохранять свое место, средства когерентной оптики должны также совершенствоваться.
Получение акустической голограммы — сложная задача, выходящая за рамки данной главы (более детальное рассмотрение см. в [1.16]), но Мы можем наметить те моменты, которые характерны для выбранного метода при любых применениях. Первый момент состоит в решении, должна ли голограмма быть получена в реальном времени. Голографирование в реальном времени является действительной необходимостью для некоторых объектов (например, плавающая рыба, работающие мышцы). Важно помнить, что объект должен быть, не только фотографически неподвижен (движение меньше, чем разрешение), но также и голографическн неподвижен (движение меньше чем четверть длины волны). Таким образом, хотя использование акустических голограмм, снимаемых в стационарных условиях, широко предлагалось для промышленного контроля, биомеднцииская акустическая голография почти исключительно связана с методами, использующими реальное время. Второй момент заключается в методе освещения объекта.
Так как внешние поверхности объектов легко записываются с помощью оптической голографии, акустическую голографию редко применяют для регистрации звука, рассеянного поверхностью. Скорее, ее используют почти исключительно для (наблюдения) видения сквозь оптически непрозрачные объекты. Таким образом, объект должен просвечиваться, но только звуковыми волнами. Для того чтобы связать эффективно ультразвук с объектом, а затем с записывающей плоскостью, все устройство и объект обычно погружаются в жидкость (как правило, в воду).
Вследствие большой величины относительного отверстия нетрудно изготовить высококачественные акустические линзы; такие линзы используют часто для перенесения изображения объекта ближе к плоскости голограммы, что обеспечивает запись голограммы с большой величиной относительного отверстия для достаточно удаленных объектов. Следующим шагом является введение опорного пучка. Преобразователи и управляющая электроника настолько хороши, а частоты так низки (по сравнению с оптическими частотами), что можно получать объектный и опорный пучки от разных преобразователей. Мы выбираем такую схему, чтобы она давала интерференционные полосы, разрешимые регистрирующей средой (при этом осуществляется запись максимального количества информации).
Преимущества формирования акустических изображений перед неакустическими в биомедицинских применениях очевидны и просты. При получении изображений внутренних органов ультразвук гораздо более безопасен, чем рентгеновские лучи, хотя требования к технике безопасности все еще активно обсуждаются. Однако даже ультразвук не безвреден, и, по-видимому, оценки допустимой дозы ежегодно пересматриваются в меньшую сторону. Таким образом, чувствительность различных методов имеет очень большое значение. Ограничения чувствительности могут возникать из ультразвуковых эффектов или из эффектов записи или восстановления. Так, например, квантовый шум может ограничивать чувствительность акустических методов, используемых в реальном масштабе времени, которые предполагают восстановление лазерным пучком. С помощью ультразвука легко распознаются мягкие ткани, являющиеся почти одинаково прозрачными для рентгеновских лучей.
С другой стороны, преимущества акустической голографии перед наиболее развитыми неголографическими акустическими методами формирования изображений уже не вполне очевидны. Даже разрешение по глубине доступно неголографическим способам [1.20]. Высокое поперечное разрешение легко осуществимо с помощью сканирующих преобразователей.

Рис. 2.3. Коммерческая ультразвуковая голографическая установка (С разрешения фирмы Holosonics, Inc.).
Таким образом, имеется иерархия несомненных фактов. Наиболее определенным фактом является полезность формирования изображения с помощью ультразвуковых волн в биомедицинских исследованиях. Менее очевидно, следует ли это изображение формировать голографическим или неголографическим способом.
Наименее определенно, по-прежнему ли этап формирования видимого изображения в акустической голографии будет включать использование когерентного света, даже если выбрана акустическая голография. Когерентные оптические методы наиболее полезны там, где затруднена обработка на вычислительной машине: в формировании изображений в реальном времени.
Визуализация акустических трехмерных изображений позволяет наблюдать объекты, интересные в биомедицинском отношении в реальном времени в выбранных по глубине плоскостях. Динамические изображения всегда гораздо лучше (косметически), чем отдельные кадры, как будет показано ниже, так как движение стремится размыть «когерентные эффекты». На рис. 2.3. показана промышленная система ультразвуковой голографии, основанная на стоячих рельефных волнах на поверхности жидкости, получающихся в результате интерференции между акустическими опорным и объектным пучками. Облучение этой поверхности лазерным пучком создает достоверное томографическое изображение объекта. Так, видикон может сканировать изображение с тем, чтобы наблюдать различные сечения объекта. Одним из наиболее полезных применений является визуализация объектов с переменной и неизвестной глубиной.
На рис. 2.4 показаны кровеносные сосуды человека в конечностях (глубоко лежащие внутренние структуры взрослых людей оказываются слишком сложными объектами для получения изображений с помощью существующего оборудования). Эти картины были сняты с телевизионного устройства только что описанной системы, когда конечность помещали в просвечиваемый ультразвуком резервуар с водой. Существует много потенциальных применений акустической голографии.
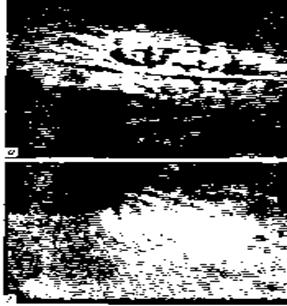
Рис. 2.4. Изображение, полученное с помощью ультразвуковой голографической установки, приведенной на рис. 2.3 (С разрешения фирмы Holosonics, Inc.). с — раэдноенный кровеносный сосуд в верхней части рукн: б — глубокий кровеносный сосуд в нижней части ноги вблизи большой берцовой кости.

Рис. 2.5. Псевдоскопическое изображение тропической рыбки, полученное в реальном времени Вейдом и Лэндри (Калифорнийский университет, Санта-Барбара) в 1968 г.
Непрозрачность кристаллов холестерина указывает па возможность наблюдения холестериновых образований в сосудах. Еще одной когерентной оптической системой, работающей в реальном времени, является формирование изображений на основе дифракции Брэгга. В такой системе объект освещается одночастотным преобразователем, расположенным на дне резервуара с жидкостью. Трехмерное звуковое поле, образованное в резервуаре, характеризует трехмерную структуру объекта. Освещение такой трехмерной звуковой картины лазерным пучком приводит к дифракции света. Дифракция на трехмерных структурах называется дифракцией Брэгга. Анализ продифрагированного света с помощью линзы создает трехмерное оптическое изображение объекта, каким он наблюдается на выбранной длине акустической волны. Так как длины оптической и звуковой волн не равны, различны поперечное и продольное увеличения, т. е. оптическое изображение до некоторой степени искажено. На рис. 2.5 приведено одно из первых изображений биологического объекта, полученного с помощью дифракции Брэгга. Спустя семь лет после получения этого изображения качество и разрешение изображений, получаемых по этому методу, были значительно улучшены, но, не было снято никаких изображений биологического характера.
2.2 Формирование изображений методом кодирования апертуры
Формирование изображений методом кодирования апертуры — это принятое название безлинзового двухступенчатого процесса формирования изображений в точности по аналогии с обычной голографией. В обоих случаях первый шаг состоит в записи кодированного изображения объекта. В голографии кодированное изображение называется «голограммой». В случае формирования изображения с кодированием апертуры не возникло никакого общепринятого названия для кодированного изображения.
По аналогии с «голограммой» будем называть его «кодограммой». Вторым шагом является формирование трехмерного изображения путем декодирования голограммы или кодограммы. Голограммы образуются в результате интерференции между опорным и объектным волновым фронтами. Кодограммы образуются при использовании самоизлучающих объектов, отбрасывающих тени специально построенных масок на регистрирующую плоскость. Если маска оказывается френелевской зонной пластинкой, как было первоначально предложено Мертцем и Юнгом [1.21, 22], кодограмма объекта идентична голограмме похожего объекта, так что методы декодирования будут идентичны. Если кодирующая маска весьма отличается от френелевской зонной пластинки (которая есть не что иное, как бинарная голограмма точечного объекта), то будут необходимы отличные методы декодирования.
Можно показать, что кодограмма является сверткой картины объекта с апертурой (причем масштаб каждой из них зависит от геометрии схемы записи и объемных свойств объекта). Чанг и др. [1.23] различают три типа декодирующих операций: корреляцию, дифракцию и операцию, обратную свертке. Корреляция с кодирующей картиной маски является средством для превращения ее в точку (если автокорреляционная функция изображения маски имеет резкий пик). Дифракция полезна в случае, если кодирующая маска является самоизображающей (например, если это— френелевская зонная пластинка или голограмма точки, рассчитанная на вычислительной машине). Операция, обратная свертке, включает комплексную фильтрацию Фурье-образа кодограммы. Как показал Чанг и др. [1.23] и многие другие исследователи, у каждой декодирующей схемы есть свои преимущества.
Формирование изображений с кодированием апертуры дополняет обычную голографию в том, что этот метод работает лучше всего на очень коротких длинах волн, где запись интерференционной картины затруднена. На коротких длинах воли даже очертания маленькой маски отбрасывают резкие теин на большие расстояния. Для апертуры размером 2 а излучение с длиной волны л будет отбрасывать резкую тень вплоть до расстояний а2/л. Таким образом, для у и рентгеновских лучей расстояние, на которое отбрасывается тень, для такой апертуры может быть в 104 раз больше, чем расстояние при использовании той же апертуры в видимом свете. Пространственное разрешение изображения грубо оценивается как 2 а, так что ясно, что для одной и той же схемы записи можно использовать апертуру, гораздо более точно создающую тень, и, следовательно, получать гораздо более высокое разрешение при использовании у- и рентгеновских лучей, чем с видимым светом. С другой стороны, в случае формирования изображений с кодированной апертурой мы не можем достигнуть разрешения, ограниченного дифракцией на любых длинах волн.
Чтобы доказать это, заметим, что дифракционный предел разрешения примерно равен л, а в случае кодированной апертуры — а, который должен быть много больше л. При современном уровне развития техники разрешение редко бывает лучше нескольких миллиметров.
Рассмотрим, как образование тени кодирует информацию о трехмерном объекте. При предположении, что каждая точка объекта излучает независимо, тень есть просто сумма (или интеграл в случае непрерывного объекта) теней от каждой отдельной точки. Тень от каждой точки объекта имеет ту же форму, что и маска. Если сдвигать точку влево, тень движется вправо. Плоскость маски задает центр вращения точкой объекта и каждой проекцией маски. По мере того как точка смешается по направлению к маске, тень увеличивается, и наоборот. Таким образом, если известны размеры маски и ее положение относительно плоскости тени, то можно сделать заключение о том, в каком месте должна была находиться точка объекта. Более того, такой вывод, может быть, сделай оптически с использованием когерентного света.
Если в качестве маски выбрать зонную пластинку Френеля [1.21, 22], то можно получить изображение с помощью когерентной оптики. Передвижение в поперечном направлении зонной пластинки перемещает ее фокус в том же направлении. Изменение ее увеличения изменяет ее фокусное расстояние. Таким образом, трехмерный объект создает трехмерное изображение. Если маска не подходит для такого непосредственного декодирования, можно использовать когерентную оптическую согласованную фильтрацию, чтобы превратить вход в форме маски в точечный выход [1.24]. Различные согласованные фильтры могут быть использованы для декодирования разных глубин объекта. Аналогично для той же цели может использоваться нскогерептная оптическая корреляция [1.25].
В том, что было сказано до сих пор, скрывается несколько усложняющих моментов, относящихся к контрасту кодограммы (задача с протяженными объектами была впервые решена Барреттом и др. [1.26, 27], и позднее другими). Каждая точка объекта создает па кодограмме тень от кодирующей маски, как видно из рис. 2.6. Увеличение тени равно So/Si» а ее центр смешен в противоположном направлении от оси. Таким образом, точка, находящаяся на расстоянии а от центра (центральная ось является нормалью к кодирующей маске и проходит через ее центр), ведет к образованию тени, центр которой находится в точке Soa/Si по другую сторону от центра на плоскости кодограммы.
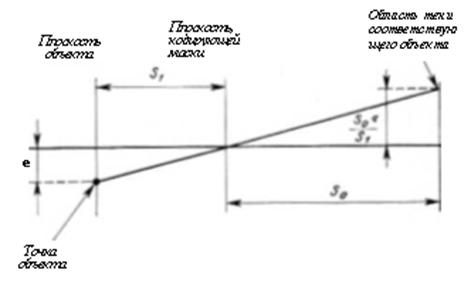
Рис. 2.6. Схема получения изображения по методу кодирующей апертуры
Для некоторых единичных точек, являющихся объектом, возможны любые типы кодирующих масок. В случае протяженных объектов яркие области теней от некоторых точек могут совпадать с темными областями от других точек, уничтожая, таким образом, всю картину на тенеграмме. Решение Барретта и др. [1.26, 27] заключалось в использовании кодирующей маски, со строго ограниченным диапазоном пространственных частот (внеосевая зонная пластинка Френеля) и в последующем ограничении пространственных частот объекта (при использовании соответствующим образом расположенной решетки с прозрачными и непрозрачными штрихами вблизи объекта) таким образом, что уничтожения тени не происходит. Со временем стало очевидным, что при тщательном выборе размеров объекта, записывающей схемы и масштаба кодирующей маски можно использовать очень широкий выбор кодирующих масок. Отношение сигнал/шум в изображении никогда не бывает лучше отношения, получаемого в камере обскура, так что экспозиция, необходимая для каждого изображения, не уменьшается. Детали объекта расфокусируются по мере перехода от одной плоскости к другой, что может приводить к появлению помех. Эти вопросы рассматриваются в недавно опубликованном обзоре [1.28], а также в работах, на которые даны ссылки в нем.
Достижимое разрешение по глубине, получаемое при формировании изображений с кодированием апертуры, показано на рис. 2.7, на котором приведены изображения пикеровского фантома щитовидной железы, полученные в у-лучах и расположенные в плоскостях на расстоянии 1 см друг от друга. Хорошо видны горячие и холодные области в различных плоскостях. Кроме того, продемонстрированы трудности, связанные с постепенной расфокусировкой точек. Верхнее и нижнее изображения были сфокусированы на плоскости выше и ниже реального объекта.
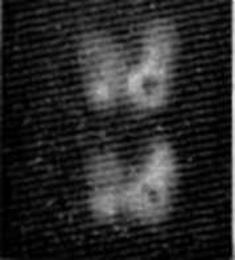
Рис. 2.7. Машинное восстановление изображений в плоскостях, отстоящих друг от друга на 1 см, полученных в -у-лучах с помощью осевой зонной пластинки Френеля. Постоянный фон удален вычитанием изображений, закодированных двумя зонными пластинками, имеющими сдвиг фазы 180°. (С разрешения Дж. Д. Сирля и др.)
В последней модификации этого метода используются многократные быстро сменяющиеся маски для получения некоторых результатов, которые не могут быть получены при использовании одной маски. В частности, в этом методе точки расфокусируются при •прохождении плоскости фокусировки быстрее [1.29]. В изображении, образованном лучами света, приходящими от кодограммы (или в этом случае обратно проектируемыми математическими «лучами» в случае восстановления на вычислительной машине), лучи должны проходить через некоторые плоскости по пути к плоскости изображения, и через все другие плоскости за изображением. Таким образом, точка в некотором сечении объекта оставляет следы во всех плоскостях изображения. Это проявляется в появлении ложного изображения. Задача состоит в минимизации «вне-фокусных» изображений. Существуют два основных взаимодополняющих способа сделать это. Во-первых, использование как можно большей численной апертуры (большая кодограмма и близко расположенный объект). Из простои схемы мы видим, что точечные изображения, образованные при более высоких численных апертурах, приводят к большему распространению шумов в любой смежной плоскости по сравнению с изображениями, образованными при меньших численных апертурах. Во-вторых, можно пытаться уничтожить остаточное внефокусное изображение с помощью других внефокусных изображений. Это требует двух или более восстановлений, дающих то же самое сфокусированное изображение и ряд других ослабленных внефокусных изображений. Чанг и др. [1.23] использовали для этих целей 50%-ные пропускающие кодирующие маски и их дополнения. Акашу и др. [1.29] распространили этот принцип на большее число масок. Этот подход был весьма успешным.
В таком случае, какое же место занимает формирование изображений с кодированием апертуры среди других методов, используемых в биологии? В принципе метод обладает несколькими уникальными преимуществами. Качество изображений оказывается несколько лучше, чем качество, получаемое в существующих методах, например, в камере Ангера.. Качество изображения улучшается как косметически (недискретное, более приятное на вид изображение, потому что оно формируется аналоговым методом в противоположность изображению, в виде набора дискретных точек, что имеет место в камере Ангера), так и по содержанию (разрешение деталей по глубине представляет собой информацию, часто полезную и никогда недоступную ранее). Требуемые времена экспозиций только слегка хуже в случае формирования изображений с кодированной апертурой. Трудно сделать количественные оценки. Нам бы хотелось записать обычное изображение (скажем, используя камеру Ангера и точечную апертуру) и кодограмму, имея одну и ту же интенсивность излучения от объекта в течение различных промежутков времени, до тех пор, пока они не создадут эквивалентные и приемлемые изображения. К сожалению, в силу только что объясненных причин не легко определить эквивалентность изображений. Для врача эквивалентность вряд ли полезна. Некоторые врачи предпочитают зернистые изображения, полученные в камере Ангера, к которым они привыкли. Что касается отношения сигнал/шум, то квантовый шум фона при получении изображений с кодированной апертурой всегда будет приводить к тому, что метод оказывается менее чувствительным по сравнению с прямыми методами формирования изображений. Принимая во внимание все эти утверждения, можно оценить потери в чувствительности для любой системы с кодированной апертурой в 10—20% по сравнению с лучшими системами, непосредственно формирующими изображение. Необходимое устройство при этом легкое, дешевое и легко транспортируемое. Трехмерность изображения может быть весьма полезной), а ограничивается наблюдением одной плоскости в каждый момент времени по уже рассмотренным причинам для случая акустической голографии).
Некоторые потенциальные потребители возражают против задержки во времени, связанной с проявлением пленки и необходимостью подвергать результирующую кодограмму оптической обработке. Можно было бы сконструировать устройства, непосредственно превращающие картины падающих у- или рентгеновских лучей в модуляцию когерентного света. К сожалению, это не поможет. Поставленным требованиям удовлетворяют кодограммы, интегрированные во времени. Кодограмма, интегрированная во времени, может быть почти мгновенно декодирована при использовании пространственных модуляторов света, работающих в реальном времени [1.76]. Подходящая матрица детекторов позволила бы иметь цифровые (и почти мгновенные) представления изображений и манипуляции с ними. Итак, идеи, навеянные аналогиями с когерентной оптикой, казалось, определенно найдут применения, но в то же время часть операций, выполненных когерентной оптической обработкой, можно заменить цифровой обработкой из соображений скорости. Это движение в сторону цифровой обработки возможно, так как числом элементов изображения в кодограмме относительно легко управлять цифровыми способами. И снова биомедицина имеет дело с довольно небольшим числом элементов изображения, так что способность когерентной оптики обрабатывать большие массивы данных оказывается здесь излишней.
2.3 Трансаксиальная томография
Читателям, специализирующимся в области биомедицинских наук, не нужно введение в трансаксиальную томографию. Остальные читатели, возможно, захотят обратиться к недавно опубликованной обзорной работе [1.30]. Основная идея томографии состоит в получении изображения поперечного сечения объекта путем соответствующей комбинации большого числа рентгеновских изображений, снятых под различными углами относительно объекта. Разумеется, рентгеновская картина не содержит информации о глубине объекта. Каждый рентгеновский луч ослабляется на своем пути в результате интегрального поглощения. В настоящее время вычислительные машины производят всю обработку, но, возможно, это тот случай, когда когерентная обработка может быть полезной. Имеются доказательства предпринимаемых в этой области усилий. Наиболее успешным методом когерентной оптической обработки применительно к трансаксиальной томографии, известным нам, является метод, предложенный Петерсом [1.31]. В оптической вычислительной технике в применении к трансаксиальной томографии, данные обычно записываются на движущуюся фотографическую пленку по мере того, как объект (пациент) вращается между источником узкого «веерного» пучка рентгеновских лучей и пленкой. Поэтому экспозиция в любой момент времени будет проекцией узкого среза объекта на пленку при определенной ориентации объекта. Под «проекцией» мы подразумеваем то, что ослабление интенсивности рентгеновских лучей вдоль линии между источником и любой частью пленки есть интегральное поглощение вдоль этой линии. Простейший способ посмотреть, как должен выглядеть объект в плоскости веерного пучка рентгеновских лучей, состоит в простом «обратном проектировании» и суммировании всех зарегистрированных проекций. Говоря об «обратной проекции», мы имеем в виду предположение (легко осуществляемое в оптике), что поглощение в объекте вдоль каждой линии однородно. Таким образом, созданное изображение является действительной картиной поглощения объекта, свернутой с 1/г (где г — полярная координата поперечного сечения). Операция, обратная свертке (deconvolution), является классической операцией в когерентной оптике. Петерс [1.31] пытался выполнить эту операцию когерентными методами.
Позднее другие исследователи осуществляли эту процедуру некогерентиыми средствами. Третья группа исследователей делала инверсию на вычислительной машине. Сейчас не ясно, какой способ будет доминировать. Исследования в этой области находятся на очень ранней стадии, все основные операции совместимы с когерентной оптикой, и объем данных достаточно велик, чтобы сделать привлекательным ее использование.
2.4 Формирование трехмерных рентгеновских изображений
Мы только что заметили, что рентгеновские изображения сжаты в одном измерении. Метод формирования изображений с помощью кодирующей апертуры можно распространить на извлечение такой информации параллаксными методами в полной аналогии с трансаксиальной томографией. Таким образом, источник рентгеновских лучей специальной формы [1.32], состоящий из, определенным образом расположенных точечных источников рентгеновских лучей [1.33], может записать форму рентгеновской кодограммы, которую можно декодировать последовательно плоскость за плоскостью.
2.5 Кодирование длины волны
Давно вошедшим в практику применением когерентной оптики является* декодирование с помощью решеток [1.34]. Если решетка (например, решетка Рончи или решетчатый объект) освещается когерентным светом, то создается очень отчетливая и предсказуемая дифракционная картина, или Фурье-преобразование. При выборе определенной части такой картины с помощью пространственного фильтра и последующем формировании изображения последнее формируется без решетки. Если решетка покрывает только часть первоначального изображения, создается только эта часть изображения. Произведение решетки, обозначенной r(х,у), и объекта— о(х, у) является закодированным изображением
g(x, у)=о(х, у)r(х,у).
Делая преобразование Фурье обеих частей этого уравнения, получаем
G(fx,fy)= O(fx.fy)* R{fx,fy),
где,
G(fx,fy)=Z[g(xty)], O(fx.fy) = Z[o(x,y)],
R{fx,fy) = Z[r(x,y)].
Z [*]—оператор Фурье-преобразования, * — знак свертки. Так как r(х, у) — периодическая функция, то R(fx, fv) — тоже периодическая функция. Тогда будут иметь место пики в плоскости Фурье-преобразования, соответствующие каждому пику R(fx, fy)-Каждый из этих пиков содержит в его окрестности O(fx, fy). С помощью фильтрации в плоскости Фурье-преобразования мы получаем восстановленный объект о(х, у). Маковский [1.35] изобрел большое число методов, посредством которых решетка, сделанная из чередующихся полосок двух различных материалов, помещается в плоскость изображения специального рентгеновского устройства или стандартной пассивной рентгеновской камеры. Выбором материалов с известными резкими краями поглощения он формирует «контрастное» изображение решетки только для излучения с энергией, попадающей между двумя краями поглощения.
Для тех частей картины излучения, для которого оба компонента решетки являются прозрачными, решетка не видима. Аналогично для тех частей картины излучения, которое задерживается обоими материалами, нет никакой видимой решетки.
Таким образом, только излучение, пропускаемое одним материалом штриха и экранируемое другим, создает картину решетки. Поэтому только такие части изображения преобразуются в соответствующую часть плоскости Фурье-преобразования и, следовательно, вносят вклад в выходное изображение. Этот и подобные методы позволяют в некоторых случаях игнорировать некоторые общие детали (вода, кость и т. д.). Ясно, что такие решетки также применимы при формировании изображений с кодированной апертурой.
3. Обработка сигналов
В этом разделе мы рассмотрим когерентные оптические методы обработки пространственно-представимых «сигналов». Такими сигналами могут быть изображения или другие формы представления данных (например, записи электроэнцефалограмм).
3.1 Обработка изображений
После того как изображение зарегистрировано па некотором носителе, может, однако, потребоваться его некоторая модификация перед тем, как оно примет вид, удобный или желаемый для наблюдения человеком. Все методы обработки изображений, которые мы здесь рассмотрим, основаны па преобразовании имеющихся данных в соответствии с известными правилами. Следовательно, эти методы не добавляют никакой новой информации. Они скорее придают вес информации, уже имеющейся в изображении, путем учета интересов ее пользователя.
Обработка изображений может быть осуществлена на ЭВМ, а также и с помощью когерентной оптики. Обработка изображений на ЭВМ является более универсальной и гибкой, чем когерентная оптическая обработка изображений, поэтому цифровые методы обработки предпочтительны, если они не исключаются стоимостью, удобством или объемом вычислений. Во всех этих случаях оптические методы обработки изображений имеют преимущество. Что касается стоимости, то цифровая обработка требует устройства преобразования изображения из аналоговой формы в цифровую для его ввода в ЭВМ, собственно ЭВМ для преобразования изображения требуемым образом и устройства отображения для представления обработанного изображения наблюдателю. Все эти устройства оказываются более дорогими, чем весь когерентный оптический процессор (входное устройство протяжки пленки, линзы, лазер и выходной экран). Кроме того, оптические вычислительные устройства имеют большое преимущество в скорости обработки информации. Постоянные операции по обработке изображений могут выполняться оптически со скоростью смены пленки на входе оптического процессора. Информационная пропускная способность оптического процессора невероятно велика по сравнению с цифровыми ЭВМ. Это краткое обсуждение, разумеется, не дает достаточной информации для выбора между оптической и цифровой обработкой изображений, но предлагает лишь некоторые предварительные соображения. Положение усложнилось с появлением гибридных оптикоэлектронных вычислительных устройств, которые, в частности, рассмотрены в обзоре Кейсесента [1.36].
Биомедицинские изображения, по-видимому, не содержат достаточно информации, чтобы создать трудности для цифровых ЭВМ, хотя проблемы стоимости и удобства могут потребовать применения оптических методов обработки изображений при условии, что они могут обеспечить выполнение требуемых операций.
В биологии и медицине полезными могут быть следующие виды обработки изображений:
1) восстановление резкости изображений (когда нерезкие изображения, искаженные вследствие относительного перемещения объекта и камеры в процессе съемки или из-за плохой фокусировки, могут быть улучшены, если в исходных изображениях имеется достаточное отношение сигнал/шум);
2) подавление шума (когда ослабляется влияние статистически известных шумовых факторов);
3) сглаживание (когда априори желаемые характеристики изображения, подчеркиваются, а априори нежелательные детали ослабляются);
4) подчеркивание деталей (когда улучшаются все детали с определенными характеристиками).
3.2 Обработка биомедицинских данных
По ряду причин когерентная оптическая обработка почти периодических биомедицинских данных [электроэнцефалограмм (ЭЭГ), электрокардиограмм (ЭКГ), фонокардиограмм (ФКГ) и др.] является очень привлекательной. Во-первых, оптическими методами легко выполняется большинство операций, которые желательно осуществлять над такими данными (частотный анализ, взаимная корреляция, сглаживание, фильтрация в полосе частот, согласованная фильтрация и т. д.). Во-вторых, анализ осуществляется мгновенно и, следовательно, удобен для использования. Еверетт и др. [1.37] разработали устройство для прямой записи биомедицинских данных па фотопленку в виде, совместимом с многоканальной оптической обработкой.
В другом методе когерентной оптической обработки сигналов, обрабатываемые сигналы не записываются оптимальным образом специально для оптической обработки, а регистрируются с экрана осциллографа или на ленте самописца. При определенных довольно обычных условиях требуемый спектр мощности таких сигналов можно получить как одно измерение Фурье-преобразования двумерной записи входного сигнала [1.38].
Преимуществом любого из этих оптических методов обработки сигналов по отношению к уже достаточно простому методу преобразования аналогового сигнала в цифровую форму и последующего выполнения быстрого преобразования Фурье на ЭВМ должна остаться скорость обработки (отображение результатов вычисления можно получить в реальном времени, если данные вводятся непрерывно с помощью соответствующего входного устройства, способного работать в когерентном свете [1.36]).
4. Представление изображений
Окончательным «потребителем» биомедицинских изображений является биолог или медик. Эффективное использование когерентных оптических методов представления изображений может сделать изображение значительно более легко понимаемым для исследователей. Никакой новой информации при этом не производится, однако имеющаяся информация может быть представлена по-новому, в более удобной для исследователя форме.
4.1 Псевдопараллакс
Мы уже отмечали, что формирование изображения методом кодирования апертуры и акустическая голография позволяют последовательно фокусироваться на различные по глубине плоскости. Если мы зарегистрируем серию таких изображений с одним и тем же коэффициентом поперечного увеличения на прозрачном носителе и расположим их друг за другом на соответствующей глубине, то сможем смоделировать реальный трехмерный объект. Физические транспаранты имеют, однако, некоторые существенные недостатки при их использовании для этой пели. Во-первых, ближние транспаранты мешают наблюдать более удаленные. Во-вторых, неудобно непосредственно производить измерения расстояний между частями объекта. В-третьих, набор транспарантов представляет собой сложный объект, неудобный для хранения, транспортировки или копирования. С другой стороны, мультиплицирование изображений диффузно освещенных транспарантов на соответствующих расстояниях от голограммы обеспечивает одновременное решение всех трех только что отмеченных проблем. Рассмотрим их подробнее по порядку.
Во-первых, благодаря тому, что каждая плоскость регистрируется в отсутствие других и с одинаковой для всех дифракционной эффективностью, каждая плоскость наблюдается независимо от других па соответствующей глубине. Таким образом, в наблюдаемых изображениях дальние плоскости четко видны «сквозь» ближние. Во-вторых, поскольку изображение формируется в воздухе, а не на физическом транспаранте или экране, мы можем поместить линейку внутрь него при измерении расстояний. В-третьих, так как голограмма является легко копируемым плоским объектом, то хранение, транспортировка и копирование оказываются очень удобными.


Рис. 4.1. Несколько фотографий голографлчески синтезированного трехмерного изображения, полученного из двумерных ультразвуковых сканограмм типа В при разных глубинах
Несколько другим представляется отображение в трех измерениях ряда двумерных «срезов» (вместо различных фокальных плоскостей, которые обычно содержат случайные помехи, обусловленные дефокусировкой изображений в других плоскостях). Ультразвуковое сканирование типа В позволяет получить такие двумерные изображения, так же как и проективная томография. Таким образом, цель псевдопараллакса состоит в предоставлении возможности наблюдателю получать основные сведения о трехмерных в действительности соотношениях из серии двумерных изображений. Эти концепции были предложены Редманем [1.39] и затем развиты другими исследователями [1.40, 41]. На рис. 4.1. приведен ряд различных изображений одного и того же объекта, полученных с одной голограммы. Отдельные плоскости представляют собой расположенные на одинаковых расстояниях и параллельно друг другу «срезы» (ультразвуковое сканирование типа В) через оба глаза. Темное пятно выше одного глаза указывает на наличие рака. С помощью псевдопараллакснческих голограмм можно установить размеры, форму и местоположение раковой опухоли.
Имеется несколько схем мультиплексирования для получения псевдопараллакса. Наибольшего внимания заслуживают три: схема, реализующая метод многократных экспозиций, схема с пространственно-разделенным мультиплексированием [1.42] и схема голографического кино [1.43]. Схема с использованием многократных экспозиций (в которой между экспозициями изменяют только транспарант объекта и его местоположение) является самым простым методом мультиплексирования, а также и самым лучшим, если нужно использовать только несколько плоскостей по глубине.
Недостаток метода мультиплексирования па основе многократных экспозиций состоит в том, что дифракционная эффективность каждой из N голограмм приблизительно равна 1/JV2 от дифракционной эффективности голограммы при N=1. Сама по себе дифракционная эффективность имеет небольшое значение. Мы всегда можем использовать более мощный лазер при восстановлении изображений с голограммы. К сожалению, однако, оптический шум фона также пропорционален мощности лазера и по существу не зависит от N. Следовательно, отношение сигнал/фон изменяется как 1/N2. Лучшее что мы можем в принципе сделать — это достичь зависимости вида 1/N. Таким образом, в лучшем случае мы можем поделить яркость поровну. Имеются два пути сделать это, причем оба связаны с изготовлением N отдельных голограмм. Первый предполагает одновременное восстановление изображений со всех голограмм (метод пространственно-разделенного мультиплексирования). Другой основан на последовательном во времени восстановлении голографических изображений (метод голографического кино). В обоих способах наблюдатель думает, что видит стационарное изображение с большим числом планов по глубине. В методе пространственно-разделенного мультиплексирования это достигается путем распределения каждой отдельной голограммы на многих малых участках поверхности фотопластинки. Эти малые участки невидимы в плоскости голограммы и не создают помех в отбеленных голограммах. Помещая перед голограммой маску, использованную при записи отдельного среза по глубине, мы можем наблюдать соответствующие изображения отдельно друг от друга.
Метод голографического кино может быть использован не только для воспроизведения движения, но также и для формирования неподвижной картины со многими планами по глубине. Идея состоит в отображении каждого двумерного изображения, соответствующего определенной глубине, не одновременно, как в рассмотренном выше методе, а последовательно. Если все N изображений показывают, по крайней мере, один раз за время интегрирования глаза, то наблюдатель будет воспринимать их существующими одновременно (и, следовательно, непрерывно). Обычные методы голографического кино потерпели неудачу по очевидной причине: перемещение голограмм должно быть слишком быстрым. Чтобы сменить перед зрителем 10 голограмм размером 10 см за время 1/20 с, необходима скорость протяжки, равная 2000 см*с-1. Однако решение этой проблемы может быть найдено. Продолжая рассматривать предыдущий пример, мы можем записать десять голограмм в виде полос шириной 1 мм (на каждой по двумерному изображению) и скомпоновать затем их в один кадр-полосу шириной 1 см. После этого мы могли бы скопировать этот кадр-полосу необходимое число раз, чтобы сделать непрерывную петлю из голографической пленки. При непрерывном движении петли в считывающем пучке света будут восстанавливаться очень удовлетворительные трехмерные изображения, в которых, однако, вертикальный параллакс будет потерян [1.43]. Требуемая скорость протяжки пленки теперь равна 20 см*с-1, т. е. остается высокой, но вполне реализуемой.
4.2 Другие методы трехмерного отображения
Голография широко используется для трехмерного отображения серии двумерных изображений, полученных обычным образом.
Излагаемая тема требует детального анализа этого метода, однако в нашем распоряжении имеется несколько коротких обзоров [1.44. 45]. Редмен снова был среди пионеров, решавших эту проблему как для изображений, получаемых с помощью электронного микроскопа [1.46], так и для рентгеновских изображений [1.47]. Вместо того чтобы повторять здесь указанные обзоры, мы рассмотрим достаточно подробно один метод трехмерного отображения двумерных изображений. Предшествующие достижения подробно описаны в указанных обзорах.
Метод трехмерного отображения, который мы хотим исследовать, пригоден, в частности, для отображения всего тела и, следовательно, представляет интерес для биологов, медиков, ортопедов, нейрологов и т.д.
Упомянутый нами метод основан на использовании мультиплексных цилиндрических голограмм. Голограмма записывается в два полностью автоматизированных этапа по схеме, которая была применена Кроссом [1.48]. На первом этапе получают серию фотографий объекта с разных ракурсов таким образом, что объект находится более или менее точно в центре воображаемого круга, с границ которого и производится фотографирование. При этом либо объект помещается на вращающемся столе и (поворачивается перед неподвижным наблюдателем, либо вокруг объекта перемещается фотоаппарат. Угловой шаг между фотографиями должен быть небольшим по причинам, которые поясним позднее. Для многих целей достаточно иметь одну фотографию на каждый градус изменения ракурса. Оказывается, что для многих биологических применений требование к качеству изображения может быть весьма умеренным, так что для реализации имеющейся возможности может быть использован фиксированный круг, образованный, например, 360 равномерно распределенными недорогими фотоаппаратами. Второй этап состоит в мультиплицировании полученных фотографий на цилиндрической голограмме. Обычно вытянутая по вертикали голограмма — полоска шириной в 1° освещается лазерным светом, прошедшим через рассеиватель (если используется одно фотографическое разделение). На некотором расстоянии вдали находится плоскость голограммы. Плоскость голограммы маскируется вертикальной щелью шириной 2рr/N, где r — радиус цилиндрической голограммы, которая будет использоваться (~25 см), a N— число мультиплицируемых изображений (360 в использованном нами примере). Опорный пучок формируется точечным источником, расположенным выше транспаранта с изображением объекта. В результате N голограмм оказываются последовательно записанными на ленте пленки длиной 2рr. После проявления (и обычно отбеливания) голограмма сворачивается в цилиндр, чтобы получить цилиндрическую голограмму. Для наблюдения изображения мы освещаем голограмму сверху с помощью точечного источника, а чтобы видеть объект под различными ракурсами, мы либо обходим вокруг голограммы, либо вращаем голограмму. Наблюдаемый объект, который кажется совершенно реальным и трехмерным, оказывается как бы плавающим в центре цилиндра. Кросс [1.48] был также первым, кто предложил интересное и полезное изменение этой схемы. Кроме изменения ракурса па объект между фотографиями он изменяет также и сам объект. Таким образом, стало возможным наблюдать такие действия, как улыбка, прощальный жест рукой, воздушный поцелуй и т. д., если они были сфотографированы. Движение изображения видно тогда, когда вращается цилиндр или когда наблюдатель вращается вокруг него. Можно снимать фильм непрерывно и таким образом зарегистрировать события произвольной продолжительности, а затем их воспроизвести в виде трехмерного изображения.
5. Извлечение данных об объекте
Когерентная оптика может быть использована для извлечения данных о биологических объектах или для облегчения восприятия некоторых характерных черт объекта. При этом она выполняет функцию, которая не является просто формированием изображения и может даже совсем не включать его.
5.1 Измерение геометрических величин
Измерение биологических объектов в трех измерениях стало возможным совсем недавно по двум основным причинам. Во-первых, вплоть до настоящего времени задача обработки биологических данных превосходила возможности большинства ЭВМ и систем памяти. Во-вторых, сами методы измерений были очень несовершенными. Измерения с помощью линеек не обеспечивали адекватного описания сложных объектов. Электронная вычислительная техника разрешила первую проблему, в то время как когерентная оптика решает вторую.
Для очень точных измерений геометрических характеристик объекта с одного ракурса может быть использован метод Гара с сотр. [1.11], описанный ранее как точный оптический метод измерений. Упатниекс с сотр. [1.49] предложили метод для исследования объектов со многих ракурсов, который является обратным только что описанному методу синтеза цилиндрических голограмм Кросса [1.48]. Упатниекс использует ставший теперь обычным метод записи цилиндрических голограмм непосредственно в когерентном свете [1.50, 51]. При записи голограммы живого объекта необходимо использовать короткий импульс лазерного света, достаточный для того, чтобы «заморозить» движение объекта в пределах долей длины волны света с длиной когерентности, достаточной для записи всего объекта по глубине, и с интенсивностью, достаточной для экспонирования низкочувствительных голографических эмульсий. В настоящее время такие лазеры имеются в продаже [1.52]. В своем методе Упатниекс сначала «развертывает» цилиндр и затем одновременно освещает срез, чтобы получить точные двумерные изображения с любого ракурса, который он выбирает.
Классическим оптическим методом извлечения трехмерных данных об объекте является стереоскопический метод. Было затрачено много усилий на то, чтобы использовать голографию для решения задачи извлечения количественных данных из стереопар. Эти исследования продемонстрировали большую простоту и надежность голографии по сравнению с классическими методами, а также и новые возможности, такую, например, как наложение трехмерных решеток на стереоизображение.
5.2 Глубинные контуры
Как для микроскопических, так и для макроскопических объектов удобно иметь возможность видеть контуры, но глубине. Эти контуры выполняют несколько полезных функций. Во-первых, они представляют собой полезное и легкое для понимания представление третьего измерения на двумерных изображениях. Во-вторых, они показывают, где глубина изменяется быстрее всего. В-третьих, они позволяют производить количественные измерения глубины.
Когерентная оптика позволяет получать глубинные контуры различным образом, однако наиболее важными методами являются два — метод двухэкспозициоиной голографической интерферометрии и метод проектирования полос. Голографический метод формирования контуров с помощью двух экспозиций состоит в записи двух голограмм одного объекта на одной и той же фотопластинке, но при слегка измененных параметрах (длины полны, показателя преломления, промежуточной среды и т. д.) и последующего восстановления изображения на одной длине волны. Метод проектирования полос заключается в освещении объекта пространственно-неоднородным изображением. Метод пригоден для работы в реальном времени, поскольку основан на использовании специальной схемы освещения.
5.3 Обнаружение суммарных перемещений
Когерентная оптика предлагает несколько методов для записи и изучения перемещений объектов в объеме.
Голография обеспечивает легкий способ записи трехмерных траекторий микроскопических частиц или организмов, перемещающихся в некоторой среде [1.55, 56]. Усредненная во времени голограмма по существу является голограммой траектории (орбиты) источника.
В случае протяженных объектов движение приводит к уменьшению контраста интерференционных полос па усредненной во времени голограмме, в результате чего неподвижные части голографируемой сцепы при восстановлении создают более яркие изображения, чем движущиеся. Фелеппа [1.57] показал на примере изменения контраста в изображении плесневого грибка, вызванного его движением, что имеет место непрерывное изменение контраста от единицы (яркое изображение) для неподвижных частей до нуля (темное изображение) для частей, значительно переместившихся за время экспозиции.
Другим подходом к изучению значительных перемещений объекта является метод вычитания исследуемой сцены (живой или зарегистрированной па некотором носителе) из изображения этой же сцены, которое было получено раньше. Конечно, когерентный свет основан на вычитании (фазовых эффектах), так что он является идеальным для использования в этом методе. К счастью, превосходный и исчерпывающий обзор (библиография насчитывает 54 ссылки) интересующих нас методов вычитания сделал недавно Эберсоль [1.58], и, следовательно, более короткий обзор здесь был бы недопустим.
Другим способом обнаружения суммарных перемещений, в котором используется когерентный свет, является обычная шлирен-система Роундса с сотр. [1.59]. С помощью щелевой маски пучку света придается форма щели, затем он направляется в исследуемую камеру и далее фокусируется на другой маске, блокирующей прохождение спета на выход. При миграции клеток в части камеры, через которую проходит свет, происходит рассеяние света за пределы блокирующей маски, и он проходит на детектор. Интенсивность рассеянного света пропорциональна плотности клеток в освещаемой области камеры. Для измерения показателя миграции клеток использовался непрерывный контроль миграции диплоидного фибробласта. Имеется много модификаций этого простого метода.- Величина миграции может быть измерена путем контроля плотности клеток на различных расстояниях от края полностью сливающихся культур. В другой модификации метода свет, рассеиваемый за пределы блокирующей маски, используется для фотографирования частиц, перемещающихся в колбе. Скорость перемещения частиц может быть определена по длине полоски, соответствующей использованному времени экспозиции. Этот метод можно использовать для изучения аномальных потоков в кровеносных сосудах (турбулентности, точки покоя и т. д.) и т. п.
5.4 Обнаружение малых перемещений
Когерентная оптика обеспечивает биомедицинские науки совершенно новыми и мощными методами для наблюдения за малыми изменениями исследуемых объектов. Отметим, что изменения могут происходить медленно (при наблюдении за действительным ростом грибов) или быстро (с интервалом в несколько миллисекунд при наблюдении за изменениями грудной клетки в процессе дыхания). Интересующий пас диапазон величин перемещений лежит от долей микрона до нескольких миллиметров.
Голографическая интерферометрия и спекл-интерферометрия являются двумя широкими областями, используемыми для обнаружения перемещений методами когерентной оптики. Кратко рассмотрим каждую из них, чтобы иметь возможность сравнивать их между собой. Голографическая интерферометрия основывается на достоинстве голографии (т. е. возможности регистрировать детали объекта с оптической точностью, обычно соизмеримой с длиной волны света), а спекл-иитерферометрия использует основной недостаток голографии — спекл-эффект.
Голографическая интерферометрия является быстро развивающейся областью, достижения которой обобщены не только Абрамсоном, но и рассмотрены в недавней статье [1.60]. Поэтому здесь будет достаточно отметить некоторые исключительные преимущества голографической интерферометрии по сравнению с классической интерферометрией применительно к биомедицинским объектам.
Во-первых, в то время как классическая интерферометрия может быть использована только для исследования некоторых тонких и прозрачных объектов, голографическая интерферометрия применима для более широкого класса объектов, например для людей.
Во-вторых, тогда как классическая интерферометрия требует высококачественной оптики для своего успешного использования, голографическая интерферометрия не требует подобных мер предосторожности. Что же, следовательно, может делать голографическая интерферометрия? Среди демонстрируемых ею возможностей следует отметить:
1) наблюдение деформаций объектов (например, кости, черепа и т. п.), подвергаемых разного рода воздействиям;
2) наблюдение определенных движений и перемещений (например, движение грудной клетки при дыхании);
3) наблюдение слабых периодических движений, таких, например, которые вызваны давлением крови.
Спекл-интерферометрия [1.61] представляет собой аналогичный метод и по сравнению с голографической интерферометрией имеет три преимущества и один недостаток. Одним из преимуществ спекл-интерферометрии является большее по величине перемещение объекта, допустимое при наблюдении. Другое преимущество состоит в том, что чувствительность обнаружения перемещений оказывается более подходящей для исследований (а не ограничивается долями длины волны, как в голографической интерферометрии). Третьим преимуществом является возможность прямого наблюдения в реальном времени без какой-либо фотографической регистрации. Основной недостаток спекл-ннтерферометрии заключается в том, что качество изображения и контраст интерференционных полос оказываются обычно хуже, чем в голографической интерферометрии.
Некоторые использования рассматриваемых методов в биологии и медицине уже появляются. Барьян с сотр. [1.62] использовал спекл-интерферометрию для изучения барабанных перепонок в ушах. Другие [1.63, 64] использовали усредненные во времени голограммы для определения видов (мод) колебаний барабанной перепонки. Балли [1.65] исследовал барабанные перепонки методом двухэкспозиционной голографии. Веденалл [1.66] использовал тот же метод для изучения подвижности зубов. Ряд исследователей [1.67—69] использовали голографическую интерферометрию для ортопедических исследований. Грегущ [1.70] записывал картины распределения выдыхаемого воздуха с помощью усредненной во времени голографии.
6. Распознавание образов
Существуют четыре совершенно различных подхода к когерентным оптическим методам распознавания биомедицинских объектов. Их можно классифицировать двумя способами. Во-первых, распознавание может осуществляться либо с использованием света, непосредственно получаемого от объекта (например, полученного в результате прохождения сквозь объект, отражения, рассеяния и т. д.), либо с использованием света, проходящего через изображение объекта, предварительно зарегистрированное на соответствующем носителе. Очевидно, что первый метод более предпочтителен, если имеется возможность его реализации. Во-вторых, процедура распознавания может быть использована либо для распознавания одного объекта, либо для целого ансамбля объектов. Ниже - мы обсудим эти два шага независимого выбора более детально.
Выбор между объектом и его изображением для решения задачи распознавания не всегда легок. Объект или его изображение должны обладать определенными, хорошо известными свойствами, чтобы они могли быть введены в когерентную оптическую систему распознавания образов. Во-первых, объект или его изображение не должны рассеивать свет (это исключает множество объектов, в том числе и людей, для непосредственного использования). Во-вторых, объект или изображение должны быть доступны для оптической системы (это исключает объекты, находящиеся внутри других непрозрачных или диффузных объектов, а также объекты, которые не могут быть легко доставлены в лабораторию). В-третьих, свет должен хорошо отображать характеристики объекта, полезные для распознавания (для некоторых объектов наиболее полезные характеристики не совпадают с диапазоном длин волн когерентной оптики, поэтому в рентгеновском и акустическом диапазонах нужно использовать изображения, а не сами объекты). С другой стороны, непосредственное использование самих объектов иногда оказывается выгодным. Так, оно делает процедуру распознавания более быстрой (практически мгновенной). Кроме того, реальные объекты могут исследоваться одновременно или последовательно при использовании различных длин волн, состоянии поляризации света и т.д.
Выбор между единичным объектом (или изображением) или множеством объектов (или изображений) также труден и важен. Мы приведем некоторые преимущества каждого из них и поймем это после более общего обсуждения. Единичный объект или изображение имеют единственную ориентацию (три угловые степени свободы фиксированы для него). Таким образом, можно использовать много различных оптических фильтров, а также устройств вращения изображения, чтобы заставить один фильтр быть более или менее согласованным с ориентацией объекта.
Рассмотрим, например, объект в виде непрозрачного цилиндра. При рассматривании цилиндра с любого из двух направлений вдоль его оси он выглядит как круг. При рассматривании его с любого направления, перпендикулярного оси, он оказывается прямоугольником. И наконец, цилиндр принимает другие формы с иных направлений. Используя круглые прямоугольные маски, а также много других масок, мы можем быть достаточно уверенными, что сможем идентифицировать этот объект и определить его ориентацию. Полагая три угла и1, и2 и и3 , определяющих ориентацию, случайными независимыми переменными, мы можем написать функцию распределения Р(и1, и2 ,и3). К чтобы описать вероятность любой угловой ориентации. Пусть изображение, соответствующее углам и1, и2 ,и3, описывается функцией I(хч у, и1, и2 ,и3)- Используя одну маску, мы можем сделать одно — распознать усредненное или ожидаемое изображение
![]() .
.
Для многих объектов ![]() не имеет
каких-либо характерных особенностей. Второй подход заключается в распознавании I (х, у, и1, и2 ,и3
) в заданном диапазоне от и1 до и1 +Ди1
от и2 до и2+ +Ди2
и от и3 до и3
+Ди3, где Ди1, Ди2 и Ди3
— наибольшие величины, которые еще обеспечивают
«хорошую» корреляцию с I(х, у, и1 +Ди1 , и2+Ди2
, и3 +Ди3,) Тогда, испытав много объектов, мы можем положить, что полное число типов
масок, которое мы ищем, равно числу масок, хорошо коррелирующих с I(х,
у, и1,
и2 ,и3). деленному на
величину Р(и1,
и2 ,и3) Ди1, Ди2 ,Ди3- Мы можем теперь так выбрать набор и1, и2 ,и3. чтобы он обеспечил
наиболее отличительные характеристики. Точность требует, чтобы мы принимали во
внимание статистически значительное число хороших корреляций. Конечно, проверяя
множество объектов параллельно (используя мощную и самую замечательную
способность оптической обработки), мы можем осуществить статистическое
усреднение одновременно. В настоящее время используются как последовательные,
так и параллельные системы распознавания.
не имеет
каких-либо характерных особенностей. Второй подход заключается в распознавании I (х, у, и1, и2 ,и3
) в заданном диапазоне от и1 до и1 +Ди1
от и2 до и2+ +Ди2
и от и3 до и3
+Ди3, где Ди1, Ди2 и Ди3
— наибольшие величины, которые еще обеспечивают
«хорошую» корреляцию с I(х, у, и1 +Ди1 , и2+Ди2
, и3 +Ди3,) Тогда, испытав много объектов, мы можем положить, что полное число типов
масок, которое мы ищем, равно числу масок, хорошо коррелирующих с I(х,
у, и1,
и2 ,и3). деленному на
величину Р(и1,
и2 ,и3) Ди1, Ди2 ,Ди3- Мы можем теперь так выбрать набор и1, и2 ,и3. чтобы он обеспечил
наиболее отличительные характеристики. Точность требует, чтобы мы принимали во
внимание статистически значительное число хороших корреляций. Конечно, проверяя
множество объектов параллельно (используя мощную и самую замечательную
способность оптической обработки), мы можем осуществить статистическое
усреднение одновременно. В настоящее время используются как последовательные,
так и параллельные системы распознавания.
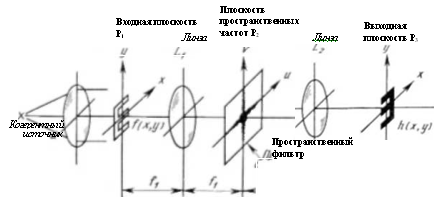
Рис. 6.1. Оптическое преобразование Фурье и обработка изображений
Как тогда происходит распознавание образов с помощью когерентной оптики? Ответ, хорошо аргументированный в других работах [1.71], состоит в использовании оптического фурье-преобразования над входным распределением (формируемого в плоскости Р2 в результате прохождения когерентного света через линзу L1 как показано на рис. 6.1). Таким образом, сформированная картина преобразования Фурье имеет ряд специфических свойств, а именно:
1) амплитудные характеристики Фурье-образа не зависят от поперечных размеров объекта или положения маски;
2) амплитудные характеристики Фурье-образа не изменяются при преобразовании координат вида (х, у)—>-( —х, —у). Таким образом, например, цифры 6 и 9 имеют преобразования Фурье с идентичным распределением амплитуд;
3) при когерентной записи (т. е. при использовании интерференции с опорным пучком) фазовая информация сохраняется, и цифры 6 и 9 могут быть отличены друг от друга. Такой комплексный фильтр обычно называют согласованным пространственным фильтром;
4) фурьс-образ поворачивается в пространстве при повороте объекта;
5)размеры Фурье-образа увеличиваются пропорционально уменьшению размеров объекта или изображения и наоборот;
6)самая яркая часть Фурье-образа находится в его центре;
7)комплексная амплитуда Фурье-образа представляет собой когерентную сумму индивидуальных комплексных амплитуд от дельных составных частей объекта или изображения.
Из свойств 1 и 7 мы видим, что поле, состоящее из многих объектов, может быть обработано параллельно. При этом все объекты вносят самостоятельные и совершенно одинаковые преобразования Фурье, не зависящие от их поперечного положения во входной плоскости.
6.1 Операционные методы
Имеются два отдельных способа использования преобразования Фурье для решения задачи распознавания образов. При первом способе (предназначенном для случаев последовательной обработки, а также для некоторых случаев параллельной обработки) мы можем измерить амплитудную (а иногда и фазовую) информацию, содержащуюся в Фурье-преобразовании и сравнить ее оптическими или электронными методами с аналогичными картинами для различных, ранее встречавшихся объектов. Оптически эта операция осуществляется помещением маски (позитивной или комплексной) в плоскость Фурье-преобразования и измерением прошедшего света. При использовании электронных методов сравнения в частотную плоскость помещают специальные фотодетекторы в виде секторов и колец [1.72]. При втором способе (он соответствует некоторым случаям параллельной обработки) мы можем использовать свет, прошедший через фильтр, для формирования изображения входной сцены. Изображение оказывается самым ярким для тех частей входной сцены, для которых через маску прошло больше всего света. Для равномерно освещенной сцены это означает, что объекты, наиболее близко соответствующие тест-объекту, использованному для изготовления маски, проявляют себя в виде ярких пятен. Ограничив этот отклик, мы можем определить местоположение и сосчитать объекты предварительно выбранной формы.
Изменения в размере объекта и его ориентации (относительно оптической оси) важны в разной степени для объектов разной формы, например вращение не оказывает существенного влияния при распознавании клеток, обладающих осевой симметрией. В любом случае вращение и изменение размера может быть выполнено либо физически, либо оптически (например, вращением «призмы Довэ), чтобы привести объект в соответствие с тест-объектом. Можно преобразовать преобразование Фурье в преобразование Меллина (инвариантное к масштабу объекта), а также и получить преобразование, инвариантное к вращению [1.73], путем соответствующего воздействия на входное изображение перед обработкой.
6.2 Применения
Имеются два тина областей применения когерентных оптических методов распознавания образов: во-первых, когда сцена, объект или образ очень сложны, чтобы можно было использовать удобные цифровые методы, и, во-вторых, когда высокая скорость измерения объекта исключает применение цифровых методов. В обоих этих случаях оптическое распознавание оказывается необходимым решением. Оптическое распознавание образов также является очевидным подходом к решению проблемы, когда измерения, которые должны быть выполнены, по своей природе оказываются оптическими.
Показательным применением когерентной оптики является автоматический счет ретикулоцитов с помощью согласованных фильтров, синтезированных на ЭВМ. Квалифицированный техник может сосчитать до 500 штук в минуту. С помощью когерентной оптики мы можем обработать почти мгновенно 1 млн. (это соответствует числу ретикулоцитов на площади реального предметного стекла диаметром 1,5 см) [1.74]. В данном случае используется параллельная обработка всех освещаемых клеток. Следовательно, метод работает благодаря наличию большого числа клеток, определенные усредненные свойства которых оказываются априори известными. Например, в большом поле с объектами спичкообразной формы часть этих объектов, ориентированная вертикально с точностью ±5°, предсказывается с высокой точностью. И наоборот, если мы измеряем число, таким образом, ориентированных объектов спичкообразной формы, мы можем подсчитать их полное число. Используемые в рассматриваемом случае пространственные фильтры искали определенные обобщенные образы ретикулоцитов, по всей вероятности, не заключающие в себе точно любую клетку, а Достаточно хорошо отображающие много клеток, чтобы обеспечить основу для счета. Реальный фильтр, несколько идеализированный, синтезировался на ЭВМ.
Другое применение, которое было продемонстрировано, связано с отображением рентгеновских изображений грудной клетки для постановки диагноза пневмокониоза (затемнения легкого) [1.75]. В этом случае критерием является увеличение высокочастотных компонент в пространственном спектре тенеграммы объекта с пневмокониозом. Аналогичные измерения были выполнены над рядом других изображений, интересующих медиков.
Вероятно, самым интересным применением для обработки данных была идентификация клеток (например, видов лейкоцитов) в жидкой системе [1.76]. В данном случае не формируется никакого изображения. Для освещения отдельных клеток используется свет разных длин волн, освещающий клетки при прохождении ими точки с фиксированным освещением. Часть света, дифрагированная каждой клеткой под разными углами, является мерой размеров и формы клеток. Поскольку обрабатывается большое число клеток, то статистический анализ может быть вполне точным. Конечно, перемещение объекта (всегда присутствующее по определению в жидкой системе) не вызывает изменений в картине Фурье-преобразования.
7. Выводы
Биомедицинские применения когерентной оптики многочисленны, эффективны, но случайны. Коммерческое использование когерентной оптики не предпринималось, не считая некоторых упомянутых ранее замечательных исключений.
8. Приложение: различные методы формирования трехмерных изображений
О формировании трехмерных изображений было сказано так много, что возможна некоторая путаница. Целью данного приложения является систематизация различных терминов и понятий с тем, чтобы они стали легкими для понимания и сравнения между собой.
Пусть нам дан трехмерный объект, который может содержать и некоторую внутреннюю структуру. Каким образом мы можем его зарегистрировать на двумерном носителе? Существуют четыре основных способа решения этой проблемы. Во-первых, мы можем записать голограмму этого объекта. Голограмма зарегистрирует полную трехмерную информацию об объекте (за исключением теневых эффектов в плоских голограммах, которые исчезают в цилиндрической голограмме). Во-вторых, мы можем сжать одно измерение, чтобы обеспечить правильное изображение в двух измерениях и неясное в третьем. Метод проекций в рентгенотехнике даст хорошие иллюстрации этого. С помощью точечного источника излучения мы можем спроектировать на экран тень объекта (как это показано на рис. 8.1,а). Отметим, что для каждой точки теневого изображения мы можем провести прямую линию, соединяющую эту точку с точечным источником. Распределение поглощения излучения вдоль этой линии оказывается неопределенным (во всяком случае, известно только полное поглощение вдоль этой линии). Обычные рентгеновские изображения имеют именно такой характер. Назовем такие проекции двумерными проекциями (для достижения цели, поставленной в приложении). В отличие от этого один срез двумерной проекции (который мог бы быть получен с помощью расходящегося пучка в виде веера, как показано на рис. 8.1, б), мы назовем одномерной проекцией.
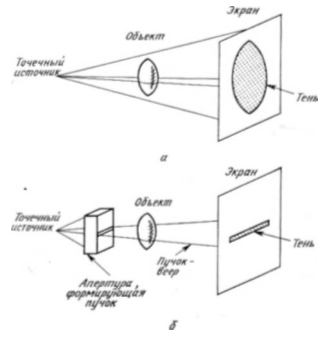
Рис. 8.1. Точечный источник создает конус направленных на объект лучен, которые и образуют на экране его теневое изображение (а). Если между точечным источником и объектом поместить щелевую диафрагму, то объект будет освещаться только веером лучей. В этом случае мы имеем трансаксиальное освещение, показанное на нижнем рисунке (б).
Получив проекции объекта (одно- и двумерные) с многих ракурсов и осуществив восстановление, мы можем синтезировать изображение трехмерного объекта (по его двумерным проекциям) или получить двумерное сечение этого объекта веерным пучком (по его одномерным проекциям). Примерами синтеза трехмерных изображений объекта по его двумерным проекциям являются псевдопараллаксные изображения, а также цилиндрические мультиплексные голограммы. Примером синтеза двумерного изображения объекта по его одномерным проекциям служит трансаксиальная томография. Во всех этих случаях дополнительное измерение синтезируется по многочисленным проекциям, полученным с многих направлений. В-третьих, мы можем совсем не учитывать одну координату из трех. Метод профилирования, является примером такого подхода. Обозначив поперечные координаты через х и у, а координату по глубине через z, получаем профили изображений в координатах х—z при постоянном у и в координатах у—z при постоянном х. И, наконец, в-четвертых, мы можем точно записать изображение в координатах х—у и восстановить затем координату z (измерение по глубине) некоторым образом (например, с помощью контуров по глубине.
Мы должны теперь уделить больше внимания голографии с малой числовой апертурой (которая включает акустическую голографию и формирование изображений методом кодированной апертуры). Предположим, что мы восстанавливаем изображение с голограммы, используя оптическое излучение с длиной волны л.
Если апертура голограммы равна А, а расстояние от голограммы до плоскости изображения D, то поперечное разрешение будет приблизительно лD/A, а глубина фокуса лD2/A2. Таким образом, части трехмерного изображения, разделенные, но глубине на расстояние, большее, чем лD2/A2, могут рассматриваться последовательно. Простейший способ реализации этой идеи состоит в перемещении экрана наблюдения в пределах реального изображения взад и вперед от голограммы.
Сейчас мы можем объяснить термин «томография». Томография стала означать метод формирования двумерных изображений поперечных сечений объекта. Она понятно и хорошо названа трансаксиальной томографией. Изображение оказывается томографическим, если освещение находится в плоскости сечения объекта. Назовем центральную нормаль к плоскости сечения его «осью». В этом случае мы видим причину использования слова «трансаксиальиый»: оно использовано для описания характера освещения. Последовательные плоскости по глубине, получаемые с кодограмм или акустических голограмм, оказываются аксиальными томографическими изображениями. К сожалению, иногда слово «аксиальный» используется тогда, когда следует употребить слово «трансаксиальный» (как, например, в аббревиатуре CAT — computerized axial tomography, что означает «цифровая аксиальная томография»), поэтому мы не оставили подходящего слова для такого рода томографии. Исследователи, работающие в области акустической голографии и формирования изображений с помощью кодированных апертур, просто ссылаются на свои «томографические» изображения.
Томографические изображения могут быть синтезированы голографически таким образом, что наблюдатель видит каждое томографическое изображение в правильном трехмерном соотношении к каждому другому томографическому изображению. Это не дает никакой новой информации, но помогает человеку-наблюдателю легче воспринимать информацию, уже имеющуюся в томографических изображениях.
Литература
1. Abbe Е., Arch. Mikrosk. Anat, 9, 413 (1873).
2. Gabor D., Nature, 161, 777 (1948).
3. Leits E. N.. Upatnieks J., /. Opt. Soc. Am., 52, 1123 (1962).
4. Toth L.. Collins S. A , Jr., Appl. Pht/s Letters, 13, 7 (1968).
5. Сох М.Е., Buckles R. G., Whitlow D., Appl. Opt., 12, 128 (1971).
6. McMahon D.H., Caulfield H. J., Appl. Opt., 9, 91 (1970).
7. Thompson B.J., /. Opt. Soc. Am., 53 (1963). Silverman В. Л., Thompson B. J., Ward J. H., У. Appl. Met., 3. 792 (1964).
8. Boettner E.A., Thompson B. J., Opt. Eng., 12, 56 (1973).
9. Singh К., Attl. Fond., 27, 197 (1972).
10. J. Opt. Soc. Am., 66, vol. 11 (1976).
11. Gara A.D., Majkowski R.P., Staplcton Т.Т., Appl. Opt, 12, 2172 (1973).
12. Balasubramanian N.. Opt. Eng., 14, 448 (1975).
13. Caulfield H.J. Hirschfcld Т., Weinberg J. M., Herron R. E., Proc. IEEE. 65. 84 (1977). [Имеется перевод: Колфнлд Г. и др. — ТИИЭР, 1977, т. 65 № I, с. 101.]
14. Rosen А.N.. Opt. Laser Tech., 7, 127 (1975).
15. McMahon D.II., Laser Focus, 6, 34 (1970), Appl. Opt, 11, 798 (1972).
16. Mueller R.K.. Acoustical Holography Survey, in: Advances in Holography, cd. by N. H.
17. Farhat, vol. 1, Dekker, New York, 1975.
18. Mueller R. Sheridon N. K-, Appl. Phys. Letters, 9, 328 (1966.)
19. Greguss P., Acoustica, 29, 52 (1973).
20. Landry J., Kcyani H., Wade G., Bragg Diffraction Imaging, in: Acoustical Holography, cd. by G. Wade, vol. 4, Plenum Press, New York, 1972.
21. Whitman R.L, Ahmed M., Korpel A., A Progress Report on the Laser Scanned Acoustic Camera, in: Acoustical Holography, Plenum Press, New York. 1974.
22. Mertz L., /. Opt. Soc. Am., 50, 505 (1960).
23. Young N. O., Sky and Telescope, 25, 8 (1963).
24. Chang L.Т., Macdonald В., Pcrcz-Mendez V., Proc. SP1E, 89. 9 (1977).
25. Gaskill J.D.. Whitehead F. R., Gray J. E., O'Mara R. E., Matched Filter Restoration of Coded Gamma and X-Ray Imaging, in: Applications of Optical Instrumentation in Medicine, SPIE, vol. 35, 1973.
26. Chang L.Т., Kaplan S. N.. Macdonald В., Perez-Mendcz V., Shiraishi L., /. Nucl. Med., 15, 1063 (1974).
27. Barrett H.H., /. NucL Med., 13. 382 (1972).
28. Barrett H. IL, Horrigan F. A., Appl. Opt, 12, 2686 (1973).
29. Rogers W.L., Coded Aperture Imaging in Nuclear Medicine, Review and Update, in: ERDA Conf. on Applications of X- and Y-Ravs. Ann Arbor, May 1976.
30. Akcasu A.Z.. May R. S.. Knoll G. F., Rogers W. L., Koral K. F.. Jones L. W., Opt Eng., 13, 117 (1974).
31. Zaklad H., Electronics, 14, 89. (1976).
32. Peters Т.M., IEEE Trans., BME-21, 214 (1974).
33. ВаггсЛ II.H.( Radiology, 104, 429 (1972).
34. Weiss IL, Three-Dimensional X-Ray Information Retrieving by Optical Filtering, in: Proceeding of the 1974 International Optical Computing Conference IEEE. 1974.
35. Bicdermann K., /. Opt. Soc. Am., 61. 1439 (1971).
36. Macovski A., Phys. Med. Biol., 19, 523 (1974).
37. Casasent D., Hybrid Processors, in: Optical Data Processing, ed. by S. Lee: Topics in Applied Physics, Springer, Berlin, Heidelberg, New York; IEEF Trans. Comput. C-24, 318 (1975).
38. Everett R.L., Lopez G., Anderson W.L., Simpson J.W., A Fourier Opticai Phonocardiogram Record-Analyze System, in: Proceedings of the San Diego Biomedical Svmposium. SPIE, vol. 1, 1972.
39. Shamir J.. Winzer G., Opt Acta, 19. 795 (1972).
40. Redman J.D., /. ScL Instr., 2. 651 (1969).
41. Greguss P.. Caulfield H.J., Science, 177, 422 (1972).
42. Falus M., Caulfield H.J., Greguss P., Laser and Unconventional Optics, 51, 3 (1974).
43. Caulfield H.J., Appl Opt, 9, 1218 (1970).
44. De Bitetto D.J.. Appl. Phys. Letters,Caulfield II.J., Lu S., The Applications of Holography, Wiley-Intersciencc, New York, 1970, Chap. VIII.
45. Benton S. A.. Opt. Eng., 14, 402 (1975).
46. Chapman J.A., Grundy S.M. W., Wolton W.P., Redman J.D., Three Dimensional Reconstructions from Electron Micrographs by Holography, in: l'roc. 5th Eur. Congr. on Electron Microscopy, 1972.
47. Redman J.D., Wolton W.P., Shuttleworth E., Nature, 220, 58 (1968).
48. Cross L., School of Holography, San Francisco, unpublished.
49. Upatnieks J.t Leonard C. D., Mattila E. S., Archival Storage of Three Dimensional Images, in: International Opt. Сотр. Conf., 1975, IEEE No. CH0941-5c.
50. Jeong Т.H., Rudolph R., Lockctt P.. /. Opt. Soc. Am., 56, 1203 (1966).
51. Какичашвнли Ш.Д., Ковалева A.H, Рухадзе В.А.— Опт. и спектроскоп. — 1968, 24, № 4, с. 627.
52. In the USA Apollo Lasers, Hadron, and International Laser Systems market such lasers.
53. Caulfield II.J., Hirschfcld Т., Weinberg J.M., Herron R., Proc. IEEE, 65, 84 (1977). [Имеется перевод: Колфилд Г. и др. — ТИИЭР, 1977, т. 65, №1, с. 101.]
54. Varner J.R., Holographic Contouring, Alternatives and Applications, in: Developments in Holography, SPIE, vol. 25, 1971.
55. Lu S., Hemstreet H.W., Jr., Caulfield II.J., Phys. Letters. 2514, 294 (1967).
56. Brooks R.E., Hcflinger L.O., Wucrkcr R.P., Brioncs R.H., Appl. Phys. Letters, 7, 92 (1965).
57. Felcppa E.J.t IEEE, BME-I9, 194 (1972).
58. Ebersole J.F., Opt. Eng., 14, 436 (1975).
59. Rounds D.E., Olson R.S., Booher J., Measurement of Cell Migration Index with a Ис-Ne Laser, in: Third Conference on the Laser, Anals of the N. Y. Acad. Scl., vol. 267, 1976.
60. Sol lid J.E., Opt. Eng., 14, 460 (1975).
61. Stetson K.A., Opt. Eng., 14, 482 (1975).
62. Burian K-, Firtze W., Schwomma W., Holographic Study of the Ear Drum, in: Symposium 1976 on Elcctro-cochleography and Holography in Medicine, Miinster, March 1976, A29.
63. Tonndorff J., Khanm S. H., /. Acoust. Soc. Am., 49, 120 (1971).
64. Hogmoen K-. Gundersen Т., Holographic Vibration Analysis of the Osskular Chain, in: Svmposium 1976 on Electro-cochleography and Holography in Medicine, Munster, March 1976, A30.
65. van Bally G., Trommclfell als Mittel zur Differentialdiagnose von Schallci-tungsstorungen MEDEX 76, 3rd International Exhibition and Congress on Medical Electrics and Bioenginccring, Basel, June 1976.
66. Wedenall P.R., cited in Greguss P., Opt. Laser Technol, 8, 153 (1976).
67. Mausler G., Schuenk Т., Seidel Holographic Deformation Measurement for Optimizing Hip-Joint Prosthesis, in: Symposium 1976 on Electro-cochleography and Ilolography in Medicine, Munster, March 1976, p. 7.
68. Vukicevic D., Hancevic J., Nikolic V., Vukiccric S., Application of Holographic Intcrferomctry in the Biomechanics of the Locomotor System, in: Symposium 1976 on Electro-cochleographv and Holography in Medicine, Munster, March 1976, p. 7.
69. 7.69. Bremble G.R.. Laker M.J., Hardinge K.A. Preliminary Study of Fracture Fixation Using Holographic Intcrferomctry, in: Holography in Medicine,
P. Greguss, IPC Science and Tech. Press. Richmond, England, 1975, pp. 65—68.
70. Greguss P., Opt Laser Technol., 8, 153 (1976).
71. Vander Lugt A., IEEE Trans., IT 10. 139 (1964); Caulfield H J., Holographic Pattern Recognition — New Thoughts on Old Problems, in: Holography and Optical Filtering, NASA SP-299 (1973).
72. Thomasson S.Т., Middleton Т.J., Jensen N.. Coherent Optics in Mapping, SPIE, vol. 45, 1974; also George N.. Thomasson Т., Spindel A., U. S. Pat. 3689772 (1972).
73. Casasent D., Psaltis D., Appl. Opt, 15, 1795 (1976).
74. Shi N.K., Carlson F.P., IEEE Trans., BME-23, 84 (1976).
75. Kruger R.P.. Thompson W.В.. Turner Л.F., IEEE Trans, SMC-4, 40 (1974).
76. Salzman G.C, Crowell J.M., Goad C.A., Hansen К.M., Hiebert R.D., La Baure P.M., Martin J. C, Ingram M. L., Mullaney P.F., Clinical Medicine, 21 (1975).
Перепечатка материалов без ссылки на наш сайт запрещена