Дипломная работа: Разработка PIC-контроллера устройства измерения временных величин сигналов
Дипломная работа: Разработка PIC-контроллера устройства измерения временных величин сигналов
Содержание
1. ОСНОВНАЯ ТЕХНИЧЕСКАЯ ЧАСТЬ
1.1 Обзор аналогичных устройств
1.1.1 Классификация цифровых измерительных приборов
1.1.2 Цифровые измерители времени
1.1.2.1 Цифровой хронометр с генератором нониусных импульсов
Цифровой хронометр с линией задержки импульсов
1.2 Разработка структурной схемы устройства
1.3 Описание базового микроконтроллера
1.3.1 Регистры
1.3.2 Стек
1.3.3 Порты ввода/вывода
1.3.4 Таймер
1.3.5 Предделитель
1.4 Разработка программного обеспечения
1.4.1 Обзор команд
1.4.2 Программа PIC-контроллерного устройства измерения временных величин сигналов
1.5 Выбор и обоснование элементов
1.5.1 Отличительные особенности микроконтроллера
1.5.2 Описание используемых транзисторов
1.5.3 Описание используемых диодов
1.6 Принцип работы программно–аппаратных средств
2 АППАРАТНО-ПРОГРАММНЫЕ СРЕДСТВА КОНТРОЛЯ И ДИАГНОСТИКИ УСТРОЙСТВА
2.1 Аппаратные средства контроля
2.1.1 Логический пробник (одноконтактный)
2.1.2 Осциллограф (С1-65А)
2.1.3 Вольтметр В7-16А
2.2 Алгоритм поиска неисправности
2.2 Алгоритм поиска неисправностей
3 ЭКОНОМИЧЕСКАЯ ЧАСТЬ
3.1 Расчет оптовой отпускной цены
3.1.1 Расчет затрат на основные материалы
3.1.2 Расчет затрат на покупные комплектующие изделия
3.2 Построение графика безубыточности
3.3 Расчет эксплуатационных показателей
3.3.1 Расчет величины капитальных затрат
3.3.2 Расчет показателей эксплуатационных расходов
ВВЕДЕНИЕ
Современная информационно–измирительная техника располагает совокупностью средств измерения различных физических величин электрических, магнитных, механических и др. Огромное количество из этих величин в процессе измерения преобразуется в величины электрические как наиболее удобные для передачи, усиления, сравнения, точного измерения. Поэтому в развитии современной информационно–измирительной техники преобладающее значение приобретает развитие средств измерений электрических величин.
Первые автоматические ЦИП были предложены и разработаны
Ф. Е. Темниковым в середине тридцатых годов. Первые серийноспособные цифровые приборы были разработаны и изготовлены в 1954—1956 гг. в Новосибирске и во Львовском политехническом институте под руководством М. П. Цапенко, К. Б. Карандеева и А. Я. Шрамкова.
Цифровая измерительная техника постепенно стала важнейшей отраслью измерительной техники. Номенклатура цифровых приборов непрерывно расширяется, выпускаются ЦИП различных классов точности от 0,0001 до 2% с различным числом десятичных знаков отсчета от 2 до 8 (в большинстве случаев 4—5 знаков).
Созданы автоматические цифровые приборы, основанные на новых принципах, отличающиеся дискретной, кодированной формой представления результата измерения, высокими точностью и быстродействием. Цифровые приборы решают многие новые задачи измерительной техники.
В настоящее время очень развита микропроцессорная техника и микропроцессоры имеют широкое применение. Поэтому использовать во многих случаях целесообразно микропроцессоры и заменять ими обычные логические схемы, что повышает надежность и долговечность устройства в целом за счет высокой интеграции логических элементов на кристалле полупроводника.
К микропроцессорным БИС относятся и микроконтроллеры т.к. содержат интегрированные ОЗУ, ПЗУ и подсистему ввода вывода.
1.ОСНОВНАЯ ТЕХНИЧЕСКАЯ ЧАСТЬ
1.1 Обзор аналогичных устройств
1.1.1 Классификация цифровых измерительных приборов
В каждом цифровом измерительном приборе определяется числовое значение измеряемой величины в определенной системе счисления, преобразование одного кода в другой, визуальная цифровая индикация или регистрация. Все эти операции занимают определенное время, поэтому ЦИП измеряют и выдают результат измерения дискретно во времени.
Цифровые приборы делятся на цифровые приборы прямого преобразования, уравновешивания (рисунок 1.1) и комбинированные.
Цифровые приборы прямого преобразования в зависимости от характера преобразования делятся на приборы непрерывного действия, выходной код которых следует за измеряемой величиной при каждом ее изменении, превышающем ступень квантования, и на приборы циклического действия, в которых процесс измерения циклически повторяется по заданной программе и новое значение выходного кода определяется после сброса на нуль предыдущего значения.
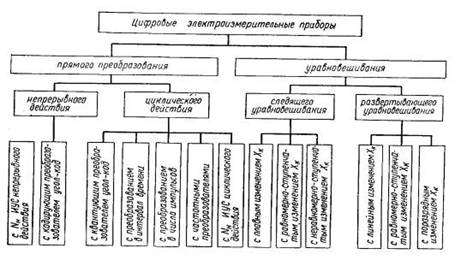
Рисунок 1.1
К цифровым приборам непрерывного действия прямого преобразования относятся, например, цифровые приборы с кодирующими преобразователями угол—код, в которых измеряемая электрическая величина в измерительном механизме преобразуется в угол а поворота подвижной части прибора, а угол а кодирующим преобразователем преобразуется в код.
Большинство цифровых приборов прямого преобразования являются приборами циклического действия. К ним, например, относятся цифровые приборы с вантующими преобразователями угол–код, работающими с фиксированным циклом, цифровые приборы с частотными преобразователями, с преобразователями в интервал времени.
Цифровые приборы уравновешивания построены по замкнутой схеме. В таких приборах в процессе измерения производится сравнение известной компенсирующей величины Хк и неизвестной по значению величины Х или величины, пропорциональной мгновенному значению или интегралу величины X. При этом в процессе уравновешивания одна из величин — Хк или величина, пропорциональная X, изменяется во времени.
Этот процесс уравновешивания продолжается до момента уравнивания величин Х и Хк, который обнаруживается одним измерительным устройством сравнения и усилителем некомпенсации УН.
Цифровые приборы уравновешивания подразделяются на приборы следящего уравновешивания, или следящие приборы, и приборы развертывающего уравновешивания.
1.1.2 Цифровые измерители времени
Интервал времени Тх измеряется цифровым хронометром (рисунок 1.2 а) путем сравнения с интервалом NT0. Для снижения погрешности необходимо уменьшение Т0, т. е. повышение скорости счета импульсов счетчиком. Максимальная скорость прямого счета счетчиками импульсов достигает 109 имп/сек, однако у большинства серийных счетчиков импульсов не превышает 107 имп/сек.
Снижение погрешности измерения интервала Тx возможно не только путем уменьшения T0 т. е. ступени квантования, но и путем уменьшения погрешностей d1t и d2t, возникающих при квантовании интервала времени Тх
1.1.2.1 Цифровой хронометр с генератором нониусных импульсов
Схема цифрового хронометра с генератором нониусных импульсов состоит из генератора квантующих импульсов с периодом Т0 (рисунок 1.1 б),
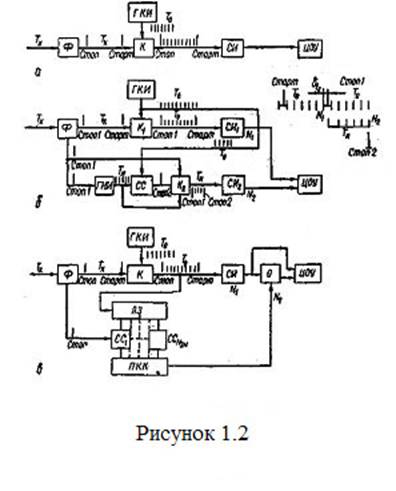
ключа К1 управляемого старт- и стоп-импульсами, схемы совпадения СС и ключа K2, который открывается стоп-импульсом и закрывается импульсом на выходе СС, и генератора нониусных импульсов ГНИ с периодом:
TН = T0 (1.1)
где
n — номинальный отсчет счетчика СИ2 (обычно равен 10).
Генератор ГНИ запускается стоп-импульсом, и импульсы с периодом Тн поступают на схему совпадения СС и через открытый стоп-импульсом ключ К2 на СИ2. На второй вход схемы совпадения непрерывно поступают импульсы Т0. В момент совпадения импульсов Т0 и Тн срабатывает СС и закрывает рлюч К2, поступление импульсов Тн на СИ2 прекращается.
Уравнение связи между d2t и числом импульсов N2, поступивших на счетчик СИ2, находим из равенства:
N2Tн = (T0 - d2t) + T0(N2 - 1) (1.2)
После подстановки находим:
d2t = N2T0/n (1.3)
Тогда измеряемый интервал Тх определяется по сумме отсчетов обоих счетчиков импульсов:
Tx = N1T0 + d2t = N1T0 + N2T0/n (1.4)
Следовательно, если d1t = 0, то погрешность от дискретности уменьшается в n раз.
Известны хронометры с нониусным генератором импульсов с погрешностью измерения, равной 10-9 сек.
1.1.2.2 Цифровой хронометр с линией задержки импульсов
Схема этого прибора (рисунок 1.2 в) состоит из генератора квантующих импульсов ГКИ, счетчика импульсов СИ, цифрового отсчетнрго устройства ЦОУ, преобразователя кода ПКК, линии задержки Л3 с N2н выходами и N2н схем совпадения СС. Каждый квантующий импульс Т0 поступает на ЛЗ, и через интервалы Т0/ N2н на соответствующих выходах ЛЗ появляются выходные импульсы. К каждому из N2н выходов ЛЗ подключена схема совпадения. На вторые входы всех СС поступает стоп-импульс. До прихода стоп-импульса все СС закрыты, в момент прихода стоп-импульса открывается та схема СС, на которой совпадают во времени импульс с периодом повторения Т0/ N2н и стоп-импульс, тогда:
d2t = N2T0/ N2н (1.5)
где
N2н — номер выходного канала линии задержки, к которому подключена сработавшая схема совпадения.
В преобразователе кода входной импульс от этой схемы совпадения по каналу N2 преобразуется в код управления младшей декадой цифрового отсчетного устройства.
Измеряемый интервал Тх равен:
Тх = N1T0 + d2t = N1T0 + N2T0/ N2н (1.6)
где
N2н — число секций линий задержки (обычно равно 10);
N2 — отсчет младшей декады ЦОУ;
N1 — отсчет остальных декад ЦОУ.
Известны схемы цифровых хронометров, в которых для измерения d1t и d2t последние преобразуются в амплитуды импульсов напряжения, числовое значение которых определяется амплитудным анализатором.
1.2 Разработка структурной схемы устройства
Ссылаясь на рассмотренные методы и структуры аналогичных устройств, можно сказать, что основой прибора должен быть микроконтроллер, как ядро, где происходит обработка входной информации, а также индикация, на которой отображается информация в удобном для оператора виде.
Так как устройство стационарное, работающее в лабораторных условиях, то есть необходимость разработать источник питания.
Для достаточной чувствительности устройства необходимо применить усилитель–формирователь. Тогда устройство имеет вид (рисунок 1.3).
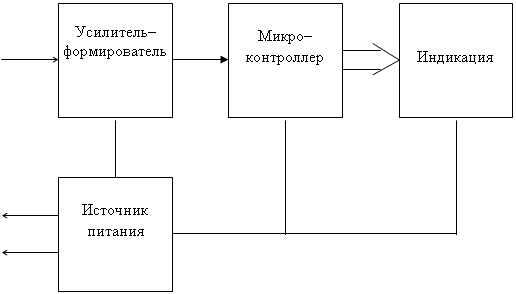
рисунок 1.3
Принцип работы структуры заключается в следующем. На вход устройства поступает сигнал с внешнего источника. Благодаря усилителю–формирователю происходит усиление сигнала и преобразование в удобную для счета форму. Преобразованный сигнал поступает в PIC через порт и благодаря ПО происходит обработка входного сигнала в виде временной величины, что в свою очередь выводится через порт на индикацию.
1.3 Описание базового микроконтроллера
1.3.1 Регистры
Память данных разбита на два банка, которые содержат регистры общего назначения РОН и регистры специального назначения РСН. Выбор банка определяется состоянием бита RРО в регистре STATUS. Когда RPO установлен в "1", выбран банк 1, иначе — 0. Первые 12 байт каждого банка отведены под РСН. Некоторые РСН отображаются одновременно на оба банка. РОН доступны из любого банка.
Регистры общего назначения могут быть адресованы прямо или косвенно с использованием регистра косвенной адресации FSR. Регистры специального назначения используются для управления ЦПУ и функциями ввода-вывода и представленны в таблице 1.1.
Регистр STATUS содержит флаги АЛУ, параметры сброса (RESET) и биты выбора банка памяти данных. Регистр STATUS так же, как и любой другой регистр, может быть операндом для любой команды. Если регистр STATUS используется в качестве операнда для команды, которая воздействует на биты Z, DC или С, то непосредственная запись в эти биты запрещена. Более того, запись в биты -ТО и -PD запрещена. Поэтому результат команды, использующей STATUS в качестве регистра назначения, может отличаться от ожидаемого.
Регистр OPTION доступен для чтения и записи и содержит различные управляющие биты для конфигурации предделителя TMRO/WDT, самого TMR0 и подтягивающих резисторов GPIO.
Регистр INTCON доступен для чтения и записи и содержит биты разрешения прерываний: общего, периферийных устройств и TMR0, а также флаг переполнения TMR0.
Таблица 1.1 — Регистры специального назначения
| Обозначение |
Описание |
|||||||
| Бит7 | Бит6 | Бит5 | Бит4 | Бит3 | Бит2 | Бит1 | Бит0 | |
| Банк 0 | ||||||||
| INDF | При обращении производится доступ к ОЗУ по адресу в FSR | |||||||
| TMR0 | Регистр TMR0 | |||||||
| PCL | Младший байт счетчика команд PC | |||||||
| STATUS | IRP | RP1 | RP0 | -TO | -PD | Z | DC | C |
| FSR | Индексный регистр косвенной адресации | |||||||
| PORTA | — | — | — | RA4/T0CKI | RA3 | RA2 | RA1 | RA0 |
| PORTB | RB7 | RB6 | RB5 | RB4 | RB3 | RB2 | RB1 | RB0/INT |
| EEDATA | Регистр данных Flash–ПЗУ | |||||||
| EEADR | Регистр адреса Flash–ПЗУ | |||||||
| PCLATH | — | — | — | Буфер для записи старших 5 бит РС | ||||
| INTCON |
GIE |
EEIE | T0IE | INTE | RBIE | T0IF | INTF |
RBIF |
| Банк 1 | ||||||||
| INDF | При обращении производится доступ к ОЗУ по адресу в FSR | |||||||
| OPTION | GPPU |
INTEDG |
T0CS |
T0SE |
PSA | PS2 | PS1 | PS0 |
| PCL | Младший байт счетчика команд PC | |||||||
| STATUS | IRP | RP1 | RP0 | -TO | -PD | Z | DC | C |
| FSR | Индексный регистр косвенной адресации | |||||||
| TRISA | — | — | — | Регистр направления данных PORTA | ||||
| TRISB | Регистр направления данных PORTB | |||||||
| EECON1 | — | — | — | EEIF | WRERR | WREN | WR | RD |
| EECON2 | Регистр 2 управления Flash–ПЗУ (физически не реализован) | |||||||
| PCLATH | — | — | — | Буфер для записи старших 5 бит РС | ||||
| INTCON |
GIE |
EEIE | T0IE | INTE | RBIE | T0IF | INTF | RBIF |
Таблица 1.2 — Состояние регистров после сброса POR
Регистр |
Состояние |
| W | xxxx xxxx |
| INDF | ---- ---- |
| TMR0 | xxxx xxxx |
| PCL | 0000 0000 |
| STATUS | 0001 1xxx |
| FSR | xxxx xxxx |
| PORTA | ---x xxxx |
| PORTB | xxxx xxxx |
| EEDATA | xxxx xxxx |
| EEADR | xxxx xxxx |
| PCLATH | ---0 0000 |
| INTCON | 0000 000x |
| OPTION | 1111 1111 |
| TRISA | ---1 1111 |
| TRISB | 1111 1111 |
| EECON1 | ---0 x000 |
| EECON2 | ---- ---- |
Регистр INDF не является физическим регистром. При обращении к регистру INDF на самом деле происходит косвенная адресация памяти данных.
Косвенная адресация реализована через регистр INDF. Любая команда, использующая регистр INDF, фактически обращается к данным, на которые указывает регистр адреса в файле (FSR). Чтение самого INDF с помощью косвенной адресации дает в результате 00h. Результатом косвенной записи в регистр INDF будет NOP.
1.3.2 Стек
PIC16F84 имеет аппаратный стек глубиной 8 13-битных слов. Стек не является частью памяти программ или данных, а указатель стека не может быть явно прочитан или модифицирован. При выполнении команды CALL или возникновении прерывания PC сохраняется в стеке. При выполнении команд RETURN, RETLW или RETFIE значение PC восстанавливается из стека. Содержимое PCLATH при этом не изменяется.
Стек работает как циклический буфер. Это означает, что после того, как в стек было помещено восемь записей, девятая помещается на место первой, десятая - на место второй, и т.д.
1.3.3 Порты ввода/вывода
PIC16F84 имеет два порта, а именно PORTA, PORTB. Некоторые каналы портов совмещают функции выводов других периферийных устройств.
PORTA — это 5-разрядный порт. RA4 имеет триггер Шмитта на входе и открытый сток на выходе. Остальные каналы порта имеют входные уровни ТТЛ и выходные буферы КМОП. Порт имеет регистр направления TRISA, с помощью которого каналы порта могут быть индивидуально настроены на ввод или на вывод.
Установка в "1" бита регистра TRISA определяет соответствующий канал PORTA как вход, т.е. выходные буферы переводятся в третье состояние. Установка в "0" бита регистра TRISA определяет соответствующий канал PORTA как выход, т.е. содержимое защелки порта выводится на соответствующий вывод микросхемы.
Чтение регистра PORTA возвращает состояние на выводах порта, тогда как запись производится в защелку PORTA. Все операции записи в порт производятся как чтение-модификация-запись, т.е. сначала производится чтение состояния выводов, затем модификация и запись в защелку. Канал RA4 также работает как вход тактового сигнала TMR0.
PORTВ — это 8-разрядный порт, который имеет регистр направления TRISB, с помощью которого каналы порта могут быть индивидуально настроены на ввод или на вывод.
Установление в "1" бита регистра TRISB определяет соответствующий какал PORTB как вход, т.е. выходные буферы переводятся в третье состояние. Установление а "0" бита регистра TRISB определяет соответствующий канал PORTB как выход, т.е. содержимое защелки порта выводится на соответствующий вывод микросхемы.
Все контакты PORTВ имеют встроенные подтягивающие резисторы. Их включением управляет один бит -RCPU, он должен быть установлен в "0". Подтягивающие резисторы автоматически выключаются, когда каналы порта настраиваются на вывод и после POR.
Все операции вывода в порт осуществляются как чтение-модификация-запись. Команды BCF и BSF, например, считывают значение порта в ЦПУ, выполняют операцию с битом и записывают результат обратно. Требуется осторожность при применении этих команд к порту, содержащему как входы, так и выходы. Например, операция BSF надбитом 5 PORTB считывает все восемь битов PORTB в ЦПУ выполняется и записывает результат в выходные защелки. Если другой канал PORTВ используется как двунаправленный и настроен в данный момент на ввод, то входной сигнал будет считан с вывода в ЦПУ и записан а защелку данных этого канала поверх предыдущего значения.
1.3.4 Таймер
Возможности TMR0:
- 8-разрядный таймер доступен для чтения и записи,
- 8-разрядный программируемый предделитель,
- выбор источника тактового сигнала (внутренний или внешний),
- выбор активного фронта внешнего тактового сигнала,
- прерывание по переполнению таймера.
Режим работы от внутреннего тактового сигнала выбирается установлением в "0" бита Т0CS. Приращение значения TMR0 производится в каждом машинном цикле (без предделителя). После записи в TMR0 нового значения инкремент счетчика запрещен два последующих цикла.
Режим работы от внешнего тактового сигнала выбирается установлением в "1" бита T0СS. Приращение значения TMR0 производится по нарастанию или по спаду, а зависимости от состояния бита T0SЕ, сигнала со входа T0CKI.
TMR0 имеет программируемый предделитель. Предделитель может быть подключен либо к TMRO, либо к WDT. Бит PSA управляет подключением предделителя.
Прерывание от TMR0 возникает при переполнении TMR0, при этом флаг T0IF устанавливается в "1" и TMR0 продолжает работу. Запретить это прерывание можно установкой в "0" бита T0IE. Процедура обработки прерывания должна установить флаг T0IF в "0" перед тем, как вновь разрешить прерывание. Прерывание от TMRO не может вывести процессор из режима SLEEP, поскольку таймер в этом режиме выключен.
1.3.5 Предделитель
8-разрядный счетчик может использоваться как предделитель для TMR0 или как постделитель для WDT. Имеется только один преддепитель, который может быть использован либо для TMR0, либо для WDT. Подключение предделителя к TMR0 означает, что WDT не может его использовать, и наоборот.
Биты PSA и PS2-PS0 определяют подключение предделителя и коэффициент деления. Когда предделитель подключен к TMR0, любая команда записи в TMR0 будет очищать предделитель. Когда предделитель подключен к WDT, команда CLRWDT очистит предделитель вместе с WDT. Предделитеяь недоступен для чтения или записи. При сбросе предделитель также очищается.
Управление подключением предделителя полностью программное, т.е. можно его переключить во время выполнения программы.
1.4 Разработка программного обеспечения
1.4.1 Обзор команд
Каждая команда PIC16F84 - это 14-битовое слово, которое разделено по смыслу на следующие части:
1. Код операции,
2. Поле для одного и более операндов, которые могут участвовать или нет в этой команде.
Система команд PIC16F84 включает в себя байт-ориентированные команды, бит-ориентированные, операции с константами и команды передачи управления. В таблицах 1.3, 1.4 и 1.5 представлены команды микроконтроллера PIC16F84.
Для байт-ориентированных команд "f" обозначает собой регистр, с которым производится действие; "d" - бит определяет, куда положить результат. Если
"d" = 0, то результат будет помещен в W регистр, при "d" = 1 результат будет помещен в "f", упомянутом в команде, в отличии от бит-ориентированных команд, в которых "b" обозначает номер бита, участвующего в команде, а "f" - это регистр , в котором этот бит расположен.
Для команд передачи управления и опреаций с константами, "k" обозначает восьми или одинадцатибитную константу.
Все команды выполняются в течение одного командного цикла. В двух случаях исполнение команды занимает два командных цикла:
1. Проверка условия и переход,
2. Изменение программного счетчика как результат выполнения команды.
Один командный цикл состоит из четырех периодов генератора. Таким о разом, для генератора с частотой 4 МГц время исполнения командного цикла будет 1 мкс.
Таблица 1.3 — Бит ориентированные команды
| Мнемокод | Название команды |
| BCF f,b | Сброс бита в регистре f |
| BSF f,b | Установка бита в регистре f |
| BTFSC f,b | Пропустить команду, если бит = 0 |
| BTFSS f,b | Пропустить команду, если бит = 1 |
Таблица 1.4 — Байт ориентированные команды
| Мнемокод | Название команды |
| ADDWF f,d | Сложение W с f |
| ANDWF f,d | Логическое И W и f |
| CLRF f | Сброс регистра f |
| CLRW | Сброс регистра W |
| COMF f,d | Инверсия регистра f |
| DECF f,d | Декремент регистра f |
| DECFSZ f,d | Декремент f, пропустить команду, если 0 |
| INCF f,d | Инкремент регистра f |
| INCFSZ f,d | Инкремент f, пропустить команду, если 0 |
| IORWF f,d | Логическое ИЛИ W и f |
| MOVF f,d | Пересылка регистра f |
| MOVWF f | Пересылка W в f |
| NOP | Холостая команда |
| RLF f,d | Сдвиг f влево через перенос |
| RRF f,d | Сдвиг f вправо через перенос |
| SUBWF f,d | Вычитание W из f |
| SWAPF f,d | Обмен местами тетрад в f |
| XORWF f,d | Исключающее ИЛИ W и f |
| ADDLW k | Сложение константы с W |
| ANDLW k | Логическое И константы и W |
| IORLW k | Логическое ИЛИ константы и W |
| SUBLW k | Вычитание W из константы |
| MOVLW k | Пересылка константы в W |
| XORLW k | Исключающее ИЛИ константы и W |
| OPTION | Загрузка W в OPTION регистр |
| TRIS f | Загрузка TRIS регистра |
Таблица 1.5 — Команды переходов
| Мнемокод | Название команды |
| CALL k | Вызов подпрограммы |
| CLRWDT | Сброс Watchdog таймера |
| GOTO k | Переход по адресу |
| RETLW k | Возврат из подпрограммы с загрузкой константы в W |
| RETFIE | Возврат из прерывания |
| RETURN | Возврат из подпрограммы |
| SLEEP | Переход в режим SLEEP |
1.4.2 Программа PIC-контроллерного устройства измерения временных велечин сигналов
Начальная инициализация
START
clrf port а ; Обнулить порт А.
clrf portb ; Обнулить порт В.
bsf status,5 ; Обращение к банку 1.
movlw 27 ; Синхронизация таймера 0 по заднему фронту
внешних тактов, включение таймера.
movwf option_reg
movlw 10
movwf trisa ; RAO - RA3 выходы, RA4 вход.
clrf trisb ; RBO - RB7 выходы.
bcf status, 5 ; Обращение к банку 0.
movlw 08 ; Для контроля дисплея
movwf Dig_x ; Загрузить во все регистры индикации 8.
MovwfDig_y
movwfDig_z
movwfDig_exp
Основной цикл программы
movlw 0A ; Установить счетчик циклов индикации.
movwf cnt_r
loop1 call refresh ; Вывод на индиторы.
decfsz cnt_r, f
goto loop1
loop5 clrf tmr0 ; Сброс таймера.
bsf status, 5 ; Обращение к банку 1.
movlw 0001 ; Разрешить прохождение внешних тактов на
вход таймера, RBO вход.
movwf trisb
bcf status,5 ; Обращение к банку 0.
movlw .199 ; 1 мс ожидания для измерения
высокочастотных сигналов.
movwf cnt1
in_ms nор
clrwdt
decfsz cntl, f
goto in_ms
bsf status, 5 ; Обращение к банку 1.
clrf trisb ; Заблокировать прохождение внешних тактов
на вход таймера, RBO выход.
bcf status, 5 ; Обращение к банку 0.
call prescaler ; Считать накопленное значение таймера.
movf H_byte, f
btfss status,2 ; Старший байт значения таймера = 0?
goto call_ms ; Нет, переход на обработку.
btfsc L_byte,7 ; Старший разряд младшего байта значения=0?
goto call_ms ; Нет, переход на обработку.
clrf tmr0 ; Сброс таймера.
bsf status,5 ; Обращение к банку 1.
movlw 01 ; Разрешить прохождение внешних тактов на
вход.
movwf trisb ; таймера, RBO вход.
bcf status,5 ; Обращение к банку 0.
nор ; 0.5 с ожидания для измерения низкочастотных сигналов.
nор
movlw 0A ; Установить счетчик циклов индикации.
movwf cnt_r
loopr call refresh ; Вывод на индикацию.
decfsz cnt_r, f
goto loopr
nор
nор
nор
bsf status,5 ; Обращение к банку 1.
clrf trisb ; Заблокировать прохождение внешних тактов
на вход таймера, RBO выход.
bcf status,5 ; Обращение к банку 0.
call prescaler ; Считать накопленное значение таймера.
movf H_byte, f
btfss status,2 ; Старший байт значения таймера = 0?
goto cal05 ; Нет, переход на обработку.
btfsc L_byte,7 ; Старший разряд младшего байта значения=0?
goto cal05 ; Нет, переход на обработку.
clrf Dig x ; Да, обнулить текущее значение индикации.
clrf Dig_y
clrf Dig_z
clrf Dig_exp
goto loop5 ; Переход на начало основного цикла.
Обработка измерения высокочастотных сигналов.
call_msclrf U ; Очистка десятичных регистров.
clrf D clrf H
clrf M
clrf DM
clrf CM
movlw 03 ; Коррекция порядка результата для
высокочастотных сигналов.
movwf Dig_exp
call segment ; Преобразование DEC в семисегментный код.
movwf portb ; Вывод цифры на индикатор.
bcf porta,1 ; Активизировать индикатор.
call Delay ; Задержка времени для сканирования.
bsf porta, 1 ; Отключить индикатор.
movf Dig_z, W ; Значение сотых для индикации.
call segment ; Преобразование DEC в семисегментный код.
movwf portb ; Вывод цифры на индикатор.
bcf porta,2 ; Активизировать индикатор.
call Delay ; Задержка времени для сканирования.
bsf porta,2 ; Отключить индикатор.
movf Dig_exp, W ; Значение порядка результата для индикации.
call segment ; Преобразование DEC в семисегментный код.
movwf portb ; Вывод цифры на индикатор.
bcf porta,3 ; Активизировать индикатор.
call Delay ; Задержка времени для сканирования.
bsf porta, 3 ; Отключить индикатор.
return
prescaler ; Считать накопленное значение таймера.
movf tmr0, W
movwf H_byte ; Сохранить значение таймера 0.
Извлечение значения предделителя TMR00.
clrf N ; Обнулить счетчик.
cicl bcf portb,0 ; Сформировать тактовый импульс на входе
синхронизации таймера.
bsf portb,0
bcf portb,0
incf N, f ; Инкремент счетчика.
movf H_byte, W
xonvf tmrO, W ; Значение таймера 0 изменилось? btfsc status,2
goto cicl ; Нет, повторить цикл.
movlw 00FF
movwf L_byte
movf N, W
subwf L_byte, f ; Получить и сохранить значение
предделителя.
incf L_byte, f
return
calc ; Преобразование формата: HEX в DEC.
movlw .16 ; Установить счетчик разрядов.
movwf N
coder
rlf L_byte, f ; Сдвиг старшего разряда значения таймера в
бит С.
rlf H_byte, f
btfsc status,0 ; Бит С = 1?
call sessn ; Да, прибавить десятичное значение разряда к десятичным регистрам.
decfsz N, f ; Декремент счетчика разрядов.
goto coder ; Продолжить преобразование.
call report ; Коррекция значений десятичных регистров.
; Вычисление порядка значения индикации.
movlw 05 ; Установить счетчик разрядов после запятой.
movwf E movlw CM+1 ; Загрузить адрес строки десятичных разрядов
для косвенной адресации.
movwf fsr
calc_ext ; Поиск старшего значащего разряда.
decf fsr, f ; Коррекция счетчика разрядов.
movf indf, W
btfss status,2 ; Значение = О?
goto end_ext ; Нет, закончить поиск.
decfsz E, f ; Все разряды проверены?
goto calc_ext ; Нет, продолжить поиск.
end_ext
movlw 2
subwf E,W
btfss status,0 ; Значение порядка < 2? goto err ; Да, ошибка - обнулить значение индикации.
btfsc status,2 ; Значение порядка = 2? goto no_app ; Да, обход округления.
; Округление выходного значения.
addlw U ; Получить адрес отбрасываемого разряда для косвенной адресации.
movwf fsr ;
decf fsr, f movlw 05 ; Сравнить значение разряда с 5.
subwf indf, W
btfss status,0 ; Значение > 5?
goto no_app ; Нет, обход округления.
incf fsr, f
incf indf, f ; Да, инкремент следующего разряда.
no_app
call report ; Коррекция значений десятичных регистров после округления. movf E,W ; Формирование значения для индикации.
addwf Dig_exp, f ; Сохранить значение Е.
addlw U ; Получить адрес строки десятичных разрядов
для косвенной адресации.
movwf fsr
movf indf, W
movwf Dig_x ; Переслать значение X.
decf fsr, f
movf indf, W
movwf Dig_y ; Переслать значение Y.
decf fsr, f
movf indf, W
movwf Dig_z ; Переслать значение Z.
return
Ошибка - обнулить значение индикации.
err movlw 0
movwf Dig_x
clrf N
call calc ; Вычисление значения для индикации.
movlw 0A ; Загрузить счетчик циклов индикации.
movwf cnt_r
goto loop1 ; Переход на начало основного цикла.
Обработка измерения низкочастотных сигналов.
саl05 clrf U ; Очистка десятичных регистров.
clrf D clrf H
clrf M
clrf DM
clrf CM
movlw .17 ; Установить счетчик разрядов.
movwfN
btfsc H_byte,7 ; Старший разряд значения таймера =1?
call sessn ; Да, загрузить в десятичные регистры
216=65536.
bcf status, 0
rlf L_byte, f ; Коррекция значения таймера до 1с.
rlf H_byte, f
clrf Dig_exp ; Коррекция порядка результата для
низкочастотных сигналов.
clrf N
call calc ; Вычисление значения для индикации.
goto loop5 ; Переход на начало основного цикла.
Delay ; Подпрограмма задержки времени для
сканирования индикации.
movlw .10
movwf cnt 1
nор
beta movlw .248
movwf cnt2
clrwdt ; Сброс сторожевого таймера.
Alfa nор
nор
decfsz cnt2, f
goto alfa
nор
nор
decfsz cntl, f
goto beta
nор
return
refresh ; Процедура сканирования индикации.
movf Dig_x, W ; Значение единиц для индикации.
call segment ; Преобразование DEC в семисегментный код.
movwf portb ; Вывод цифры на индикатор.
bcf porta, 0 ; Активизировать индикатор.
call Delay ; Задержка времени для сканирования.
bsf porta, 0 ; Отключить индикатор.
movf Dig_y, W ; Значение десятых для индикации.
movwf Dig_y
movwf Dig_z
movwf Dig_exp
return
report ; Коррекция значений десятичных регистров.
movlw 05 ; Установить счетчик разрядов,
movwf cnt_r movlw U ; Загрузить адрес строки десятичных разрядов для косвенной адресации.
movwf fsr
loop_rep
clrf i ; Очистить поправку следующего разряда.
movf indf, W
movwf N ; Загрузить значение во временный регистр.
calc_rep
movf N, W
movwf indf ; Сохранить значение.
incf i, f ; Инкремент поправки следующего разряда.
movlw 0А
subwf N, f ; Вычесть 10.
btfsc status, 0 ; Результат отрицательный?
goto calc_rep ; Нет, продолжить коррекцию.
decf i, f ; Скорректировать поправку следующего разряда.
incf fsr, f
movf i, W
addwf indf, f ; Прибавить поправку к следующему
разряду.
decfsz cnt_r, f ; Все разряды скорректированы?
goto loop_rep ; Нет, продолжить коррекцию.
return
sessn ; Преобразование значения двоичного разряда в десятичное.
movf N, W ; Загрузить номер разряда.
call tab_dec ; Получить смещения в таблице для разряда.
movwf E
call tab_dec ; Получить значение десятков тысяч.
addwf DM, f
incf E, f
movf E, W
call tab_dec ; Получить значение единиц тысяч.
addwf M, f
incf E, f
movf E, W
call tab_dec ; Получить значение сотен.
addwf H, f
incf E,f
movf E, W
call tab_dec ; Получить значение десятков.
addwf D, f
incf E, f
movf E, W
call tab_dec ; Получить значение единиц.
addwf U, f
return
END
1.5 Выбор и обоснование элементов
Для PIC-контроллерного устройства измерения временных велечин сигналов применяются не только отечественные детали, но и импортные, поскольку наша промышленность не освоила производство аналогов микроконтроллеров данного класса. За счет такой комбинации удалось достигнуть наименьшей стоимости прибора и максимально увеличить надёжность работы, а также во много раз увеличить помехоустойчивость.
1.5.1 Отличительные особенности микроконтроллера
PIC16F84 относится к семейству КМОП микроконтроллеров. Расположение выводов данного микроконтроллера представлено на рисунке 1.4 , а описание выводов — в таблице 1.6
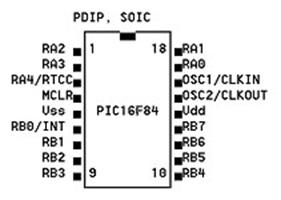
Рисунок 1.4 — Расположение выводов PIC16F84
Таблица 1.6
| Название вывода | Номер вывода |
Описание |
|
RA0 RA1 RA2 RA3 RA4/RTCC |
17 18 1 2 3 |
PORTA — двунаправленный порт ввода–вывода Может быть использован как вход внешнего тактового сигнала |
|
RB1 RB2 RB3 RB4 RB5 RB6 RB7 RB0/INT |
7 8 9 10 11 12 13 6 |
PORTB — двунаправленный порт ввода–вывода Может быть использован как вход внешнего прерывания |
| OSC1/CLKIN | 16 | Используется для подключения кварца, RC или вход внешней тактовой частоты |
| OSC2/CLKOUT | 15 | Генератор, выход тактовой частоты в режиме RC генератора, в остальных случаях используется для подключения кварца |
| MCLR | 4 | Вход сброса устройства с активным низким уровнем |
|
Vdd |
14 | Положительный вывод питания |
|
Vss |
5 | Общий провод (земля) |
Используемый микроконтроллер имеет внутреннее 1K x 14 бит Flash памяти для программ, 8-битовые данные и 64байт Flash памяти данных. Все команды состоят из одного слова (14 бит шириной) иисполняются за один цикл (400 нс при 10 МГц), кроме команд перехода, которые выполняются за два цикла (800 нс). PIC16F84 имеет прерывание, срабатывающее от четырех источников, и восьмиуровневый аппаратный стек. Периферия включает в себя 8-битный таймер/счетчик с 8-битным программируемым предварительным делителем (фактически 16 - битный таймер) и 13 линий двунаправленного ввода/вывода. Высокая нагрузочная способность (25 мА максимальный втекающий ток, 20 мА максимальный вытекающий ток) линий ввода/вывода. Максимально допустимые значения электрических параметров для данного микроконтроллера представленны в таблице 1.7
Таблица 1.7
Описание |
Максимальное значение |
Ед. изм. |
| Допустимая рабочая температура | -55°С +125 | °С |
| Температура хранения | -65°С +150 | °С |
|
Напряжение VDD относительно Vss-0,3 |
7,5 | В |
|
Напряжение -MCLR относительно Vss |
-0,3 — 14 | В |
|
Напряжение на остальных вы водах относительно VSS |
-0.6 — VDD+0.6 |
В |
| Потребляемая мощность | 800 | мВт |
|
Максимальный ток на Vss |
150 | мА |
|
Максимальный ток на VDP |
100 | мА |
|
Входной запирающий ток IIK |
±20 | мА |
|
Выходной запирающий ток IOK |
±20 | мА |
| Максимальный выходной ток стока канала ввода-вывода | 25 | мА |
| Максимальный выходной ток истока канала ввода-вывода | 20 | мА |
| Максимальный выходной ток стока PORTA (суммарный) | 80 | мА |
| Максимальный выходной ток истока PORTA (суммарный) | 50 | мА |
| Максимальный выходной ток стока PORTB (суммарный) | 150 | мА |
| Максимальный выходной ток истока PORTB (суммарный) | 100 | мА |
PIC16F84 отличается низкой стоимостью и высокой производительностью. Малый размер корпуса делает этот микроконтроллер пригодным для портативных приложений. Низкая цена, экономичность, быстродействие, простота использования и гибкость ввода/вывода делает PIC16F84 привлекательным даже в тех областях, где ранее не применялись микроконтроллеры.
1.5.2 Описание используемых транзисторов
Для разрабатываемого устройства тарнзисторы выбирались по исходному материалу, рассеиваемой мощности, диапазону рабочих частот, принципу действия. Для PIC контроллерного устройства измерения временных величин сигналов, а именно для его входной части усилителя–формирователя подошли транзисторы
КП313А (маломощный полевой транзистор) и КТ368А (высокочастотный маломощный транзистор). Их основные параметры представлены в таблицах 1.8 и 1.9.
Таблица 1.8
Параметр |
Значение |
|
Обратный ток коллектора при Uкб |
0,5/15 мкА |
|
Обратный ток эмиттера при Uэб |
1/4 мкА |
| Входное сопротивление | 6 Ом |
| Коэффициент передачи тока | 50…300 |
| Коэффициент обратной связи | — |
| Граничная частота коэффициента передачи | 900 МГц |
| Емкость коллекторного перехода | 1,7 пФ |
| Коэффициент шума | 3,3 Б |
| Рассеиваемая мощность без теплоотвода | 225 мВт |
| Температура окружающей среды | +125 — -60 |
| Общее тепловое сопротивление |
0,36 оС/мВт |
Таблица 1.9
Параметр |
Значение |
| Начальный ток стока | — |
| Крутизна характеристики | 5…10,5 мА/В |
| Напряжение отсечки | ³6 В |
| Ток утечки затвора | 10 нА |
| Коэффициент шума | 7,5 дБ |
| Входная емкость | 7 пФ |
| Проходная емкость | 0,8 пФ |
| Постоянная рассеиваемая мощность | 120 мВт |
| Температура окружающей среды | +85 — -45 |
| Общее тепловое сопротивление | — |
1.5.3 Описание используемых диодов
Импульсные диоды предназначены для преобразования импульсных сигналов.
Основные параметры импульсных диодов: импульсное прямое напряжение диода Uпр. и — наибольшее мгновенное значение прямого напряжения, обусловленное импульсным прямым током диода. Импульсное обратное напряжение диода Uобр. и — мгновенное значение обратного напряжения диода. Импульсный прямой ток диода Iпр. и — наибольшее мгновенное значение прямого тока диода, исключая повторяющиеся и неповторяющиеся переходные токи. Общая емкость диода Сд — значение емкости между выводами диода. Время прямого восстановления диода tвос. пр — время, в течении которого происходит включение диода и прямое напряжение на нем устанавливается от значения, равного нулю, да установившегося значения. Время обратного восстановления диода tвос. обр — время переключения диода с прямого тока на обратное напряжение от момента прохождения тока через нулевое значение до момента достижения обратным током заданного значения. Заряд восстановления диода Qвос — накопленный заряд диода, вытекающий во внешнюю цепь при переключении диода с прямого тока на обратное напряжение.
В таблице 1.10 приведены основные параметры диода КД503Б.
Таблица 1.10
Тип |
Максимально допустимый импульсный прямой ток, мА, при tИ = 10 мкс |
Максимально допустимый постоянный или средний прямой ток, мА |
Импульсное прямое напряжение, В |
Максимально допустимое импульсное постоянное обратное напряжение, В |
Максимальный обратный ток, мкА, при Uобр max |
Время обратного восстановления диода, мкс |
Общая емкость диода, пФ |
Температура окружающей среды, оС |
|
| от | до | ||||||||
| КД503Б | 200 | 20 | 3,5 | 30 | 10 | 0,01 | 2,5 | -40 | +85 |
1.6 Принцип работы программно–аппаратных средств
Измеряемый сигнал поступает на вход усилителя–формирователя выполненного на двух транзисторах КП313А и КТ368А, что позволяет повысить чувствительность прибора, а также увеличить входное сопротивление за счет истокого повторителя выполненного на транзисторе КП313А.
Такое включение позволяет прибору не вносить дополнительное сопротивление при измерениях. Транзистор VT2 включен в стандартном ключевом режиме и предназначен для усиления входного сигнала по напряжению.
Основной элемент PIC-контроллерного устройства измерения временных велечин сигналов — микроконтроллер PIC16F84, осуществляющий счет импульсов, поступающего на вход прибора после усилителя–формирователя, обработку полученных значений и вывод результатов измерения на табло. Частота (в герцах) отображается индикаторами HG1—HG4 в формате X,YZ·10`Е Гц, где X,YZ — десятичное значение частоты сигнала, а Е — порядок.
Микроконтроллер PIC16F84 имеет в своем составе восьмиразрядный модуль таймера (ТМR0), который может использоваться с восьмиразрядным предделителем. Последний функционирует асинхронно, поэтому таймер способен считать частоту сигналов значительно выше частоты генератора микроконтроллера, которая равна 4 МГц. Минимальное время высокого и низкого уровней входного сигнала — 10 нс, что позволяет модулю ТМR0 функционировать от внешнего сигнала частотой до 50 МГц. Предделитель задействован для повышения точности измерений. Так как его предельный коэффициент деления равен 256, максимальная разрешающая способность счетчика составляет 16 двоичных разрядов. Однако полностью содержимое предделителя невозможно считать программно, подобно регистру. Поэтому чтобы обеспечить разрешающую способность измерения 16 разрядов — 8 старших разрядов считываются из ТМR0, а 8 младших — из предделителя.
Измеряемый сигнал через резистор R2 поступает на вывод RA4 DD1, являющийся входом внешнего сигнала (T0CKI) таймера TMR0. Этот вывод соединен с RB0, переключением которого осуществляется управление режимом счета. Перед измерением производится сброс TMR0 (при этом сбрасывается и предделитель).
Для измерения вывод RB0 конфигурируется как вход на точные интервалы времени, что позволяет внешнему сигналу поступать на вход таймера. Отсчет длительности интервалов осуществляется "зашитой" в микроконтроллер программой и выполняется как точная временная задержка. По истечении ее выход, TMR0 прекращает работу, поскольку на RA4 устанавливается низкий уровень, и внешний сигнал перестает поступать на его вход.
Затем считывается накопленное 16–разрядное значение числа периодов входного сигнала: в старшие 8 разрядов записывается содержимое TMR0, а в младшие — предделителя. Для получения значения предделителя выполняется подпрограмма (с этой целью на выводе RA4 командами BSF и BCF переключается выходной уровень, т.е. программно формируется последовательность коротких импульсов). Каждый импульс инкрементирует предделитель и счетчик импульсов N, после чего проверяется содержимое TMR0, чтобы определить, увеличилось ли оно. Если оно возросло на 1, восьмиразрядное значение предделителя определяется по содержимому счетчика импульсов N как 256 — N. Далее 16–разрядное двоичное значение частоты преобразуется в 6–разрядное десятичное, которое округляется до трехзначного, а затем формируется указанный выше экспоненциальный формат для вывода на табло в динамическом режиме. Сканирование индикаторов происходит с частотой примерно 80 Гц. Высокая нагрузочная способность микроконтроллера позволила подключить индикаторы непосредственно к его выводам.
Измерение производиться в два этапа. Сначала формируется интервал времени (программа задержки) длительностью 1 мс, что соответствует области высоких частот. Если полученное значение частоты более 127 (старший байт — значение TMR0 — и старший разряд младшего байта — значение предделителя — не равны 0), оно преобразуется, и результат выводится на индикаторы. После этого цикл повторяется.
Если же значение частоты менее 127, выполняется второе измерение (для низких частот), при котором формируется интервал времени длительностью 0,5 с. Для оптимизации работы микроконтроллера он объединен с циклом вывода результата предыдущего измерения на индикаторы. Значение частоты более 127 преобразуется для индикации, при меньшем показания индикаторов обнуляются (частота входного сигнала — вне диапазона измерений или отсутствует вообще). После этого в обоих случаях полный цикл измерения повторяется.
2 Аппаратно-программные средства
контроля и диагностики устройства
2.1 Аппаратные средства контроля
При помощи данных измерительных приборов возможна полная наладка и подготовка устройства к работе, а также профилактика в дальнейшем
2.1.1 Логический пробник (одноконтактный)
Однокристальный логический пробник – прибор для индикации двоичного состояния элементов дискретных схем (см. рисунок 2.1).
Задача логического пробника – упростить проверку логических схем, давая пользователю возможность наблюдать логические уровни без настройки и калибровки, которые необходимы при измерениях с помощью осциллографов.
Очень важным достоинством логических пробников является возможность работы с различными ИС. Это очень удобно при эксплуатации вычислительных систем, где, как правило, используются различные комплексы ИС.
Важное качество пробника – это четкость и однозначность показаний.
Основные преимущества логических пробников – компактность, возможность работы в труднодоступных местах, питание от источника проверяемого логического устройства, удобство работы.
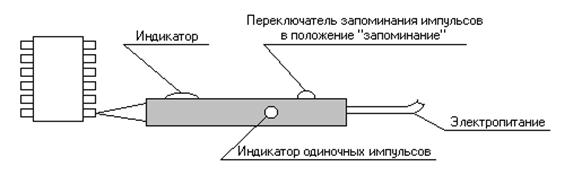
Рисунок 2.1 — Логический пробник (режим запоминания одиночных импульсов)
2.1.2 Осциллограф (С1-65А)
Осциллограф – это контрольно-измерительный прибор для измерения параметров сигналов.
Осциллографы компонуют с другими измерительными приборами для повышения их эффективности при эксплуатации, например с мультиметром, приставкой для подсчета логических переключений, цифровым индикатором для отсчета значений напряжений и временных параметров.
1. Основные сведения:
1.1 Осциллограф универсальный С1 - 65А предназначен для исследования формы электрических сигналов путем визуального исследования и измерения их амплитуды и временных параметров.
1.2 Осциллограф может эксплуатироваться в следующих условиях:
а) температура окружающего воздуха от 243 К ( - 30 С) до 323 К (+50 С);
б) относительная влажность окружающего воздуха до 98% при температуре до 308 К ( +35 С);
в) атмосферное давление
100![]() 4 кПа.
4 кПа.
1.3 Осциллограф удовлетворяет требования ГОСТа 22261 – 76 и
22737 – 77.
По точности воспроизведения формы сигнала, точности измерения временных интервалов и амплитуд осциллограф С1 – 65А относится ко II классу ГОСТа 22737 – 77.
2. Технические данные:
2.1 Рабочая часть экрана осциллографа:
по горизонтали – 80 мм ( 10 делений)
по вертикали – 64 мм (8 делений)
2.2 Минимальная частота следования развертки, при которой обеспечивается наблюдение исследуемого сигнала на наиболее быстрой развертки , не более 50 Гц.
2.3 Нормальный диапазон амплитудно-частотной характеристики тракта вертикального отклонения находиться в пределах от 0 до 10 МГц. При коэффициенте отклонения 0,005 В/дел. – от 0 до 7 МГц.
2.4 Время нарастания переходной характеристики тракта вертикального отклонения в положениях 0,1; 0,2; 0,5; 1; 2; 5; 10; переключателя V/дел. не превышает 8 нс; в положении 0,005 переключателя V/дел. не превышает 10 нс; в положениях 0,01; 0,02; 0,05; не превышает 7 нс.
2.5
Неравномерность
переходной характеристики (отражения, синхронные наводки) после времени
установления 3![]() , от считываемого
от точки на фронте ПХ, расположенной на уровне 0,1, не должна превышать 1,5%.
, от считываемого
от точки на фронте ПХ, расположенной на уровне 0,1, не должна превышать 1,5%.
2.6 Параметры входа канала вертикального отклонения:
а) входное сопротивление
1![]() 0,03 МОм;
0,03 МОм;
б) входная ёмкость, параллельная входному сопротивлению, не превышает 25 пФ
в) входное сопротивление
с выносным делителем 1: 10 10![]() 1 МОм с
ёмкостью, параллельной входному сопротивлению, 10
1 МОм с
ёмкостью, параллельной входному сопротивлению, 10![]() 2
пФ;
2
пФ;
г) вход закрытый и закрытый.
2.7 Коэффициент отклонения устанавливается одиннадцатью ступенями от 0,005 до 10V/дел. с плавной регулировкой коэффициента отклонения относительно калиброванного положения не менее чем в 2,5 раза.
2.8 Нелинейность отклонения не превышает 10%
2.9 Пределы
перемещения луча по вертикали не менее ![]() 64
мм.
64
мм.
2.10 Допускаемое суммарное значение постоянного и переменного напряжения исследуемого сигнала на закрытом входе усилителя вертикального отклонения (УВО) 300 В.
2.11 Максимальная допускаемая амплитуда исследуемого сигнала не превышает:
а) при работе без выносного делителя 60 В
б) при работе с выносным делителем 300 В.
2.12 Минимальное значение исследуемого сигнала, при котором обеспечивается класс точности осциллографа, не более 15 мВ.
2.13 Минимальная длительность исследуемого временного интервала , при которой обеспечивается класс точности осциллографа, не более 35 нс.
2.14 Предел допускаемой
основной погрешности измерения напряжения не превышает ![]() 5% в нормальных условиях
применения и 6% в рабочих условиях применения.
5% в нормальных условиях
применения и 6% в рабочих условиях применения.
2.15 Значение коэффициента развертки: 0,01; 0,02; 0,05; 0,1; 0,2; 0,5; 1; 2; 5; 10; 20; 50 мкс/дел.; 0,1; 0,2; 0,5; 1; 2; 5; 10; 20; 50 мс/дел.
2.16 Предел допускаемой
основной погрешности измерения временных интервалов во всем диапазоне развертки
( кроме растянутой ) при размере изображения по горизонтали не менее двух
делений не превышает ![]() 5% в нормальных
условиях применения и
5% в нормальных
условиях применения и ![]() 6% в рабочих
условиях применения.
6% в рабочих
условиях применения.
2.17 Внешняя синхронизация развертки осуществляется гармоническими сигналами частотой 10 Гц до 50 МГц при размахе напряжения сигнала от 0,5 до 30 В и импульсными сигналами обеих полярностей длительностью от 0,05 мкс до 1 с при амплитуде напряжения сигнала от 0,5 до 30 В. В режиме автозапуска синхронизации осуществляется сигналами частотой не менее 30 Гц.
2.18 Канал Z обеспечивает наблюдение яркостных меток при подаче на его вход среднеквадратичного значения испытательного напряжения от 1,5 до 20 В в полосе частот от 20 Гц до 10 МГц.
2.19 Параметры входа Z:
а) входное сопротивление
50![]() 5 кОм;
5 кОм;
б) входная емкость, параллельная входному сопротивлению, не более 140 пФ.
2.20 Сопротивления изоляции цепей питания между входом сетевого разъема и корпусом осциллографа не менее:
а) 20 МОм в нормальных условиях
б) 5 МОм при повышенной температуре
в) 2 МОм при повышенной влажности
2.21 Осциллограф сохраняет свои технические характеристики в пределах норм , установленных в ТУ , при питании его от сети переменного тока:
а) напряжением 220![]() 22 В, частотой 50
22 В, частотой 50![]() 0,5 Гц, 60 Гц
0,5 Гц, 60 Гц
б) напряжением 115![]() 5,75/220
5,75/220![]() 11 В частотой 400
11 В частотой 400![]() Гц
Гц
2.22 Осциллограф обеспечивает свои технические характеристики в пределах норм, установленных ТУ после времени установления рабочего режима, равного 15 мин.
2.23 Мощность потребляемая осциллографом от сети при нормальных условиях, не превышает 125 ВА.
2.24 Наработка на отказ не менее 1500 ч.
Срок службы осциллографа 7 лет.
Технический ресурс 10000 ч.
2.1.3 Вольтметр В7-16А.
Вольтметр универсальный В7 – 16А предназначен для измерения напряжения постоянного и переменного токов, активного сопротивления при регламентных, ремонтных и регулировочных работах в различных областях электроники ,а также для проверки приборов более низкого класса.
Условия эксплуатации вольтметра:
- температура окружающей среды – от 263 К ( минус 10 С) до 323 К (+50 С);
- атмосферное давление (100![]() 4) кПа
4) кПа
- относительная влажность - до 95% при температуре до 303 К ( +300 С)
1.1 1. Технические данные: Время измерения напряжения постоянного тока при включенном входном фильтре не превышает:
- 200 мс при времени преобразования 100мс и четырехзначном цифровом отсчете;
- 40 мс при времени преобразования 20 мс и четырехзначном отсчете;
- 2 мс при времени преобразования 1 мс в трехзначном цифровом отсчете;
1.2 Диапазоны измерений электрических величин соответствуют значениям , указанными в таблице 2.1.
1.3 Диапазоны измерений разбиты на поддиапазоны , указанные в таблице 2.1.
1.4 Выбор поддиапазонов измерения осуществляется ручным способом.
1.5 Частотный диапазон измеряемых напряжений переменного тока:
от 20 Гц до 50 МГц на пределе «1»
от 20 Гц до 30 МГц на пределе « 10»
от 20 Гц до 20 кГц на пределах «100» и «1000»
1.7 1.6 При измерении напряжений переменного тока вольтметр градуируется в эффективных значениях. Основная погрешность обеспечивается при измерении напряжений синусоидальной формы с содержание гармоник не более 0,1% на пределе «1» , не более 0,2% на остальных пределах ,не более 1% в диапазоне частот 100 кГц – 50 МГц.Вольтметр обеспечивает следующие режимы запуска:
- автоматически от внутреннего источника импульсов с периодом повторения 0,1 – 5 с при времени преобразования 1 мс и 20 мс, 0,2 – 5 с при времени преобразования 100 мс;
- вручную нажатии кнопки;
- дистанционно от источника импульсов частотой не более 1 кГц , 50 Гц; 10 Гц соответственно;
1.9 Предел допускаемой
основной погрешности вольтметра при измерении напряжения постоянного тока обеих
полярностей:- при времени преобразования 20 мс и 100 мс  - при времени 1 мс
- при времени 1 мс
- где Uк – конечное значение установленного предела измерений;
Uх – показание вольтметра.
1.10 Вольтметр имеет встроенный фильтр для дополнительного подавления помех последовательного вида в режиме измерения напряжения постоянного тока. Подавлением прибором помех синхронных с частотой питающей цепи, равной 50 Гц, при времени преобразования 20 и 100 мс в случае включенного фильтра составляет не менее 60 дБ.
1.11 Входное сопротивление вольтметра составляет:
- не менее 10 МОм при измерении напряжения постоянного тока;
- не менее 1 МОм при измерении напряжения переменного тока;
Таблица 2.1 — Поддиапазоны измерений
|
Наименование измеряемых величин и единицы измерений |
Наименование пределов измерений | Время преобразования, мс | |||||
| 100 | 20 | 1 | |||||
| Поддиапа-зоны измерений | Дискрет-ность | Поддиапа-зоны измерений | Дис-крет-ность | Поддиа-пазоны измерен. |
Дискрет ность |
||
|
1.Напряжение постоянного тока, В 2.Напряжение переменного тока, В 3. Активное сопротивление, Ом |
«1» «10» «100» «1000» «1» «10» «100» «1000» «1» «10» «100» «1000» «10м |
|
|
|
|
|
|






2.2 Алгоритм поиска неисправности
Базовым способом обнаружения неисправности является метод «наращивания правильности» или «расширяющего теста» в сочетании с методом сравнения с «эталоном». Метод «наращивания правильности» предполагает поэтапное последовательное расширение работоспособной части системы путем включения в эту часть устройств, проверенных на предыдущем этапе. В ряде случаев, например при неисправности индикатора, необходимо включать в эту систему заведомо исправные («эталонные») устройства.
Перед началом выполнения необходимо произвести внешний визуальный осмотр конструкции, проверить правильность монтажа согласно схеме электрической принципиальной, графическая часть лист 1, убедиться в отсутствии механических повреждений элементов, а также проверить на повреждение печатные проводники. Установить переключатели сетевого питания устройства в положение, соответствующее отключенному состоянию. Потом подключить к сети 220В 50Гц.
Устранение дефектов монтажа, а также замену неисправных элементов необходимо производить маломощным паяльником. Для защиты от статического электричества необходимо заземлить рабочий стол, паяльник, а также самого наладчика с помощью антистатического браслета. Измерение параметров схемы необходимо производить, используя вольтметр В7-16А или аналогичный.
Алгоритм поиска неисправноти представляет собой последовательность действий, которую нужно выполнить для нахождения неисправности.
Симптом: при измерении на индикаторе HG1 высвечивается информация не соответствующая цифровой и буквенной. Возможные неисправности: неисправен индикатор, нарушено ПО, нарушена динамика, обрывы линий.
2.3 Алгоритм поиска неисправностей
Базовым способом обнаружения неисправностей является метод «наращивания правильности» или «расширяющего теста» в сочетании с методом сравнения с «эталоном». Метод «наращивания правильности» предполагает поэтапное последовательное расширение работоспособной части системы путем включения в эту часть устройств, проверенных на предыдущем этапе. В ряде случаев, например при неисправности индикатора, необходимо включать в эту систему заведомо исправные («эталонные») устройства.
Перед началом выполнения необходимо произвести внешний визуальный осмотр конструкции, проверить правильность монтажа согласно схеме электрической принципиальной, графическая часть лист 1, убедиться в отсутствии механических повреждений элементов, а также проверить на повреждение печатные проводники. Установить переключатели сетевого питания устройства в положение, соответствующее отключенному состоянию. Потом подключить к сети 220В 50Гц.
Устранение дефектов монтажа, а также замену неисправных элементов необходимо производить маломощным паяльником. Для защиты от статического электричества необходимо заземлить рабочий стол, паяльник, а также самого наладчика с помощью антистатического браслета. Измерение параметров схемы необходимо производить, используя вольтметр В7-16А или аналогичный.
Алгоритм поиска неисправностей представлен в графической части дипломного проекта, лист 4.
3 ЭКОНОМИЧЕСКАЯ ЧАСТЬ
В экономической части дипломного проекта осуществляется расчет оптовой отпускной цены конструкции, по которой предприятие будет реализовывать свою продукцию потребителям.
На основании этого расчета делается вывод о целесообразности проектирования и внедрения новой конструкции в производство.
Исходные данные для расчета взяты из производственных условий.
Исходные данные для расчета курсового проекта
1. Процент транспортно-заготовительных расходов, 13 %
2. Процент доплаты основным производственным рабочим, 17 %
3. Процент дополнительной заработной платы, 11 %
4. Отчисления в пенсионный фонд, 36 %
5. Процент косвенных цеховых расходов, 92 %
6. Отчисление на социальное страхование, 3,74 %
7. Отчисления в фонд занятости работников, 2,1 %
8. Процент косвенных общезаводских расходов, 198 %
9. Процент внепроизводственных расходов, 14 %
10. Плановый процент уровня рентабельности, 20 %
11. Налог на добавленную стоимость, 20%
12. Режим работы 1-х сменный
13. Процент отчислений на ремонт и обслуживание устройства, 8%
14. Отчисления на монтажно-наладочные работы, 11%
15. Амортизационные отчисления, 9%
16. Партия 150 шт.
3.1 Расчет оптовой отпускной цены
Каждое предприятие производит продукцию и реализует ее по оптовой отпускной цене.
Оптовая цена – это те деньги, которые получит предприятие в виде выручки после реализации своей продукции.
Отпускная цена – это те деньги, которые платит покупатель с учетом налога на добавленную стоимость.
Расчет оптовой и отпускной цены конструкции осуществляется на основании калькуляции себестоимости с учетом налогообложения по законодательству Украины.
Себестоимость – это сумма всех денежных затрат предприятия, связанных с производством и реализацией единицы продукции.
В зависимости от стадии изготовления и места свершения затрат, различают цеховую, заводскую и полную себестоимости.
Цеховая себестоимость определяет затраты цехов, связанные с производством продукции, которые формируют цеховую себестоимость.
![]() , грн (3.1)
, грн (3.1)
где M – затраты на основные материалы и комплектующие покупные изделия с учетом их доставки на завод;
![]() - прямая (тарифная) заработная плата
основных производственных рабочих;
- прямая (тарифная) заработная плата
основных производственных рабочих;
![]() - доплаты к заработной плате
- доплаты к заработной плате
![]() - дополнительная заработная плата
- дополнительная заработная плата
![]() - отчисления на
социальное страхование
- отчисления на
социальное страхование
![]() - отчисления в пенсионный фонд
- отчисления в пенсионный фонд
![]() - отчисления в
фонд занятости работников
- отчисления в
фонд занятости работников
![]() - косвенные цеховые расходы.
- косвенные цеховые расходы.
Производственные затраты, связанные с изготовлением конструкции, включаемые в заводскую себестоимость, определяются по формуле:
![]() , грн (3.2)
, грн (3.2)
где ![]() - косвенные общезаводские
расходы.
- косвенные общезаводские
расходы.
Каждое предприятие не только производит свою продукцию, но и реализует ее, поэтому учитывается реализационные затраты, входящие в полную себестоимость.
![]() , грн (3.3)
, грн (3.3)
где ![]() - косвенные
внепроизводственные расходы
- косвенные
внепроизводственные расходы
Предприятие реализует свою продукцию оптом, по оптовой цене, которая определяет величину выручки завода.
![]() , грн (3.4)
, грн (3.4)
где П – плановая величина прибыли.
Покупатель приобретает продукцию с завода оптом по отпускным ценам, в состав которых включают налог на добавленную стоимость
![]() , грн (3.5)
, грн (3.5)
где НДС – налог на добавленную стоимость, который определяется по формуле:
![]() , грн (3.6)
, грн (3.6)
3.1.1 Расчет затрат на основные материалы
Основным материалом для изготовления данной конструкции является стеклотекстолит, который используется для изготовления печатных плат.
Для определения затрат на основные материалы, необходимо рассчитать массу заготовки. Она вычисляется по формуле:
![]() , кг (3.7)
, кг (3.7)
где V - объем печатной платы, ![]()
P – удельная плотность
стеклотекстолита (![]() г/
г/![]() )
)
L – длина печатной платы, 100 мм
l – ширина печатной платы, 46 мм
p – толщина печатной платы (толщина одного слоя h=0,1 см), см
![]()
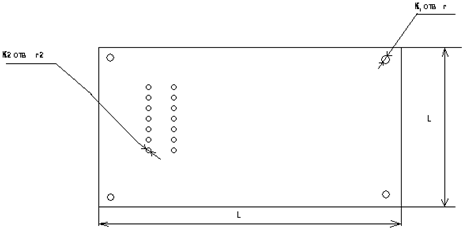
Рисунок 3.1 Эскиз печатной платы
Затраты на основные материалы рассчитываются по формуле
![]() ,грн (3.8)
,грн (3.8)
где Ц – цена стеклотекстолита, одного килограмма, грн
![]() ,грн
,грн
На основании приведенных выше расчетов определяются затраты на основные материалы в таблице 4.1:
Таблица 3.1
| Наименование затрат | Норма расхода на деталь, кг |
Цена 1 кг, грн. |
Сумма, грн |
| Стеклотекстолит | 0,016 | 10,80 | 0,17 |
| Транспортно – заготовительные расходы | 0,02 | ||
| Итого затрат на основные материалы с учетом доставки | 0,19 |
![]() (3.9)
(3.9)
![]() , грн
, грн
3.1.2 Расчет затрат на покупные комплектующие изделия
Расчет затрат на покупные комплектующие изделия осуществляется на основании данных спецификаций на покупные комплектующие изделия, входящих в конструкцию, а также договорных цен за единицу покупных комплектующих изделий. Весь расчет затрат осуществляется в таблице 4.2
![]() , грн (3.10)
, грн (3.10)
![]() , грн
, грн
На основании приведенных расчетов определяется величина материальных затрат на конструкцию, которая рассчитывается по формуле:
![]() , грн (3.11)
, грн (3.11)
где ![]() - затраты на основные
материалы с учетом доставки
- затраты на основные
материалы с учетом доставки
![]() - затраты на ПКИ
с учетом доставки на завод.
- затраты на ПКИ
с учетом доставки на завод.
![]() , грн
, грн
Таблица 3.2
| Наименование изделия | Тип | Количество, шт. | Цена 1 шт., грн. | Сумма, грн |
| Интегральные микросхемы |
PIC16F84 К142ЕН5А |
1 1 |
27,50 0,70 |
27,50 0,70 |
| Резисторы |
МЛТ 0.25 180 Ом МЛТ 0.25 24 кОм МЛТ 0.25 2 кОм МЛТ 0,125 20 кОм МЛТ 0,125 1,3 МОм МЛТ 0,125 220 Ом МЛТ 0,125 56 Ом МЛТ 0,125 820 кОм |
8 1 1 2 1 1 1 1 |
0,07 0,07 0,07 0,05 0,05 0,05 0,05 0,05 |
0,56 0,07 0,07 0,1 0,05 0,05 0,05 0,05 |
| Конденсаторы |
КМ–6А–Н90 0,1 мкФ К50–16–16В 470 мкФ К50–16–16В 100 мкФ КМ–6А–Н90 0,15 мкФ КМ–6А–Н90 68 пФ КМ–6А–Н90 33 пФ |
2 1 1 1 1 2 |
0,15 0,5 0,5 0,19 0,15 0,1 |
0,3 0,5 0,5 0,19 0,15 0,2 |
| Транзисторы |
КП313АКТ368А |
1 1 |
1,99 0,46 |
1,99 0,46 |
| Кварц |
4МГц |
1 | 1 | 1 |
| Диоды |
КД 503Б КЦ 402А |
2 1 |
0,08 0,72 |
0,16 0,72 |
| Трансформатор | Т12–220–50 | 1 | 6,54 | 6,54 |
| Индикаторы | АЛС324А | 4 | 4,46 | 17,84 |
| Кнопка | ПКН-150-1 | 1 | 0,76 | 0,76 |
| Предохранитель |
ВП1–1–0,5А |
1 | 0,19 | 0,19 |
| Разъем | 1 | 0,32 | 0,32 | |
| Итого затрат на ПКИ | 61,02 | |||
| Транспортно-заготовительные расходы | 7,93 | |||
| Итого затрат на ПКИ с учетом доставки | 68,95 |
Расчет тарифной заработной платы
В данном разделе рассчитывается величина прямой заработной платы основным производственным рабочим, доплаты и дополнительная заработная плата, а также отчисления на социальное страхование в расчете на единицу изделия.
Расчет прямой заработной платы на единицу изделия осуществляется по всем видам работ, связанных с изготовлением печатной платы с учетом ее сборки.
Для расчета прямой заработной платы необходимо знать трудоемкость изготовления печатной платы по всем видам работ. С этой целью используется формула, разработанная НИИ города Северодонецка:
![]() , час (3.12)
, час (3.12)
где Тп/пл – трудоемкость изготовления ПП по всем видам работ, час х – число паек в конструкции, в тысячных долях (0,174)
![]() , час
, час
Для определения трудоемкости изготовления ПП по всем видам работ, а также для определения прямой заработной платы основным производственным рабочим, составляется таблица 3.3.
Таблица 3.3
| Виды работ | Разряд | Трудоемк. ПП, часов | Часовая тарифная ставка, грн | Трудоемк. по видам работ | Сумма, грн | |
| % | час | |||||
| Заготовительные | 2 | 1,87 | 0,625 | 17 | 0,32 | 0,20 |
| Механосборочные | 3 | 0,682 | 20 | 0,37 | 0,25 | |
| Химико-гальванические | 2 | 0,625 | 12 | 0,22 | 0,14 | |
| Монтажные сборочные | 2 | 0,625 | 5 | 0,09 | 0,06 | |
| Наладочно-регулировочные | 4 | 0,738 | 15 | 0,28 | 0,20 | |
| Подготовительные | 2 | 0,625 | 9 | 0,17 | 0,10 | |
| Контрольные | 3 | 0,682 | 22 | 0,41 | 0,28 | |
| Итого прямой заработной платы | 1,23 | |||||
Таким образом, заработная плата основным производственным рабочим составляет 1,23 грн.
Расчет оптовой отпускной цены конструкции осуществляется с помощью ЭВМ. Распечатка калькуляции себестоимости и цены конструкции приведены в таблице 3.4.
Таблица 3.4 — Расчет оптовой цены конструкции
Наименование статей |
Сумма, грн. |
|
Затраты на основные материалы Затраты на покупные изделияТарифная зарплата рабочим Доплата основным производственным рабочим Дополнительная зарплата Отчисления в пенсионный фонд Отчисления на социальное страхование Отчисления в фонд занятости Косвенные цеховые расходы |
0,19 68,95 1,23 0,21 0,16 0,65 0,07 0,04 1,32 |
|
Итого: Цеховая себестоимость Косвенные общезаводские расходы |
72,82 2,85 |
|
Итого: Заводская себестоимость Косвенные внепроизводственные расходы |
75,67 10,59 |
|
Итого: Полная себестоимость Плановая прибыль |
86,27 3,42 |
|
Итого: Оптовая цена изделия Налог на добавленную стоимость |
89,69 4,11 |
| Итого: Отпускная цена изделия | 93,80 |
3.2 Построение графика безубыточности
Построение графика достижения точки безубыточности позволяет определить влияние на прибыль предприятия объемов производства и продаж, величин постоянных и переменных затрат, а также величину оптовой цены конструкции.
Для построения графика безубыточности необходимо в полной себестоимости конструкции выделить переменные (V) и постоянные затраты (К).
К величине переменных затрат относятся:
![]()
![]() , грн (3.13)
, грн (3.13)
![]() , грн
, грн
К постоянным затратам относятся все остальные показатели, составляющие величину полной себестоимости продукции:
![]() , грн (3.14)
, грн (3.14)
![]() , грн
, грн
Для построения графика
безубыточности необходимо использовать заданную программу выпуска изделия ![]() .
.
Величина полной себестоимости конструкции составляет 86,27 грн, в т.ч. переменные затраты – 81,74 грн, постоянные – 18,42 грн. Оптовая цена конструкции 89,69 грн. Определим точку безубыточности при выпуске изделий в количестве 150 шт.
Таким образом, для партии изделий в количестве 150 шт :- переменные затраты составят 70,74·150 = 10611 грн- постоянные затраты составят 15,53·150 = 2329,5 грн- оптовая цена всей партии равна 89,69·150 = 13453,5 грн
График безубыточности, построенный по этим данным, показан на рисунке 3.2.
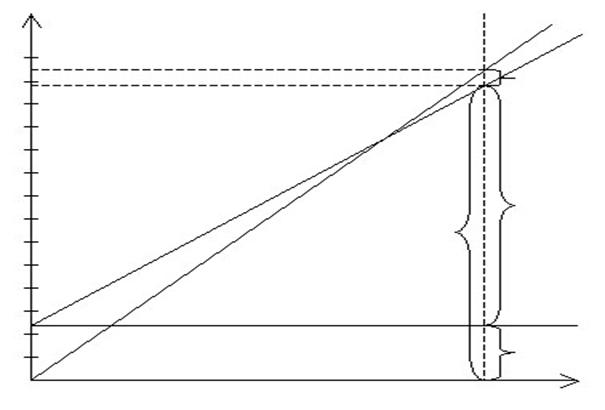
Рисунок 3.2 График безубыточности
Величина критической программы выпуска или точка безубыточности определяяется по формуле:
Nкр=(К/Цопт – V)×Nшт , шт (3.15)
Nкр=(2329,5/13453,5 - 10611) ×150 = 123 шт
Построив график, можно графическим способом определить критическую точку безубыточности – это примерно 123 шт. Это означает, что если произвести 123 единицы изделия и затем их реализовать по оптовой цене , то завод-изготовитель при этом не потеряет средств, вложенных в производство, но и не получит никакой прибыли. Если размер производимой партии изделий будет меньше 123 шт., то завод-изготовитель не получит никакой прибыли и будет работать себе в убыток. Если же размер производимой партии будет больше 123 шт., то завод-изготовитель будет получать прибыль (чем больше партия изделий, тем больше прибыль) в соответствии с построенным графиком безубыточности.
3.3 Расчет эксплуатационных показателей
Изготовленное устройство, являясь объектом эксплуатации, вызывает определенные затраты. Эти затраты характеризуют целесообразность изготовления и эксплуатации проектируемой конструкции.
Покупатель, приобретая конструкцию, осуществляет капитальные затраты и несет определенные эксплуатационные расходы.
3.3.1 Расчет величины капитальных затрат
Капитальные расходы учитывают затраты на доставку, монтаж, наладку устройства, его первоначальную стоимость и определяются по формуле:
![]() , грн (3.16)
, грн (3.16)
где К – величина капитальных расходов, грн;
![]() - отпускная цена устройства, грн;
- отпускная цена устройства, грн;
![]() - затраты на доставку изделия к
потребителю, грн;
- затраты на доставку изделия к
потребителю, грн;
![]() - затраты на монтаж и наладку
устройства, грн.
- затраты на монтаж и наладку
устройства, грн.
Затраты на доставку устройства определяются по формуле:
![]() , грн (3.17)
, грн (3.17)
Где ![]() по заданию на дипломный
проект.
по заданию на дипломный
проект.
![]() , грн
, грн
Затраты на монтаж и наладку устройства определяются по формуле:
![]() , грн (3.18)
, грн (3.18)
где ![]() - процент отчислений на
монтаж и наладку устройства составляет по заданию на дипломный проект 11%.
- процент отчислений на
монтаж и наладку устройства составляет по заданию на дипломный проект 11%.
![]() , грн
, грн
Таким образом, ![]() , грн.
, грн.
3.3.2 Расчет показателей эксплуатационных расходов
Эксплуатационные расходы позволяют учитывать амортизационные отчисления, затраты на потребляемую электроэнергию, на плановый ремонт и обслуживание, затраты на замену отказавших элементов, на устранение отказов и определяются по формуле:
![]() , грн (3.19)
, грн (3.19)
где ![]() - величина
эксплуатационных расходов, грн;
- величина
эксплуатационных расходов, грн;
А – амортизационные расходы, грн;
![]() - затраты на электроэнергию, грн;
- затраты на электроэнергию, грн;
![]() - затраты на плановый ремонт и
обслуживание, грн;
- затраты на плановый ремонт и
обслуживание, грн;
![]() - затраты на устранение отказов,
грн.
- затраты на устранение отказов,
грн.
Годовые амортизационные отчисления определяются по формуле:
![]() , грн (3.20)
, грн (3.20)
где ![]() составляют 9% по заданию
на дипломный проект.
составляют 9% по заданию
на дипломный проект.
![]() , грн
, грн
Затраты на электроэнергию определяются, исходя из потребляемой мощности всех электронесущих элементов, входящих в конструкцию устройства, по следующей формуле:
![]() , грн (3.21)
, грн (3.21)
где ![]() - суммарная потребляемая
мощность всех элементов, кВт
- суммарная потребляемая
мощность всех элементов, кВт
![]() - действительный годовой фонд
времени работы устройства, ч
- действительный годовой фонд
времени работы устройства, ч
![]() - цена одного кВт электроэнергии,
грн.
- цена одного кВт электроэнергии,
грн.
На установленный момент
времени ![]() грн.
грн.
Расчет потребляемой мощности элементов устройства выполнен табличным способом в таблице 3.5.
Таблица 3.5
| Наименование элемента | Тип |
Потребл. мощн. *10-6, кВт |
Кол-во элементов, шт |
Суммарная мощность *10-6, кВт |
| ИМС | PIC16F84 | 800 | 1 | 800 |
| Резисторы |
МЛТ 0,25 МЛТ 0,125 |
0,25 0,125 |
10 6 |
2,5 0,75 |
| Индикаторы | АЛС324А | 60 | 4 | 240 |
| Кварц | 0,05 | 1 | 0,05 | |
| Диоды |
КД503Б КЦ402А |
0,05 0,2 |
1 1 |
0,05 0,2 |
| Транзисторы |
КП313А КТ368А |
0,20 0,25 |
1 1 |
0,20 0,25 |
| Трансформатор | Т12-220-50 | 450 | 1 | 450 |
| Итого | 1500 |
![]() , час (3.22)
, час (3.22)
![]() , час
, час
где ![]() - коэффициент, учитывающий
потери времени на ремонт и обслуживание устройства, равен 8% по заданию на
дипломный проект.
- коэффициент, учитывающий
потери времени на ремонт и обслуживание устройства, равен 8% по заданию на
дипломный проект.
Т.о ![]() грн
грн
Затраты на плановый ремонт и обслуживание составляют 10 – 15% от отпускной цены устройства. Приняв равными 10%, определяются по формуле:
![]() , грн (3.23)
, грн (3.23)
![]() , грн
, грн
Затраты на замену отказавших элементов с учетом интенсивности отказов в течение года определяются по формуле:
![]() , грн (3.24)
, грн (3.24)
где ![]() - количество элементов в
устройстве, шт;
- количество элементов в
устройстве, шт;
![]() - интенсивность отказов элемента,
1/час;
- интенсивность отказов элемента,
1/час;
![]() - цена одного элемента, грн;
- цена одного элемента, грн;
Расчет проводится табличным способом и приведен в таблице 3.6.
Таблица 3.6
| Название элемента | Марка, ГОСТ | Кол-во, шт. |
|
|
Кол-во отказов 1 эл-та, год*10-6 |
Общая |
|
Сумма затрат *10-6, грн |
| ИМС |
PIC16F84 К142ЕН5А |
1 1 |
0,14 0,14 |
1880 |
263,2 263,2 |
263,2 263,2 |
27,5 0,7 |
7238 184 |
| Резистор | МЛТ 0.25, МЛТ 0,125 | 16 | 0,126 | 236,88 | 3790 | 1,00 | 3790 | |
| Конденсатор |
К50-16, КМ-6А |
8 | 0,213 | 400,44 | 3203,52 | 1,84 | 5894 | |
| Трансформатор | Т12–220–50 | 1 | 0,4 | 752 | 752 | 6,54 | 4918 | |
| Транзисторы |
КП313А, КП368А |
2 | 0,4 | 752 | 1504 | 2,45 | 3685 | |
| Индикаторы | АЛС324А | 4 | 0,2 | 376 | 1504 | 17,84 | 26831 | |
| Диоды |
КД503Б, КЦ402А |
3 | 0,14 | 263,2 | 789,6 | 0,88 | 695 | |
| Предохранитель | ВП–1–0,5А | 1 | 0,126 | 236,88 | 236,88 | 0,19 | 45 | |
| Кварц | 1 | 0,2 | 376 | 376 | 1,00 | 376 | ||
| Кнопка | ПКН-59-96 | 1 | 0,4 | 752 | 752 | 0,76 | 571 | |
| Разъем | 1 | 0,2 | 376 | 376 | 0,32 | 120 |
![]()
![]() , грн
, грн
Затраты на устранение отказов определяются по формуле:
![]() , грн (3.25)
, грн (3.25)
где Т1 – среднее время устранения 1 отказа (1,2 час);
![]() - часовая тарифная ставка работника,
устраняющего отказ.
- часовая тарифная ставка работника,
устраняющего отказ.
Процент дополнительной зарплаты и отчислений на социальное страхование – по заданию на дипломный проект.
Т.о ![]() грн
грн
После проведенных расчетов определяем величину эксплуатационных расходов по формуле:
![]() грн
грн
Выводы по расчетам
В результате проведенных расчетов была получена величина нижнего предела оптовой цены конструкции, ниже которого сделки по реализации конструкции предприятию заключать не имеет смысла, т.к. оно будет нести убытки. Также в дипломном проекте был построен график безубыточности, который в полной мере отображает зависимость убытков или прибыли предприятия-производителя от количества партии изделий. В данном случае критической точкой безубыточности является партия изделий в 123 шт.
Также был произведен расчет затрат на эксплуатацию, ремонт и наладку устройства; расчет электроэнергии, потребляемой устройством в год, — все эти затраты будет оплачивать покупатель в процессе пользования готовым изделием.
В итоге можно сделать вывод, что проектируемое устройство целесообразно запустить в производство, т.к. оно обладает широкими возможностями для его применения и использования, доступно большинству пользователей по цене, и будет приносить прибыль.
Перепечатка материалов без ссылки на наш сайт запрещена