Контрольная работа: Измерительные преобразователи электрических величин
Контрольная работа: Измерительные преобразователи электрических величин
СЕВАСТОПОЛЬСКИЙ НАЦИОНАЛЬНЫЙ УНИВЕРСИТЕТ
ЯДЕРНОЙ ЭНЕРГИИ И ПРОМЫШЛЕННОСТИ
Реферат
по дисциплине ОМЭТ
Тема: Измерительные преобразователи. Классификация, принцип действия, электрические схемы, режим работы, метрологические характеристики и области применения
Студента Группы ЭСЭ 22-в
Левицкого Павла Владимировича
Проверил -----------------------------(------------------)
Севастополь
2008 г.
Введение
Конкретные методы измерений определяются видом измеряемых величин, их размерами, требуемой точностью результата, быстротой процесса измерения, условиями, при которых проводятся измерения, и рядом других признаков. Каждую физическую величину можно измерить несколькими методами, которые могут отличаться друг от друга особенностями как технического, так и методического характера. В отношении технических особенностей можно сказать, что существует множество методов измерения, и по мере развития науки и техники, число их все увеличивается. С методической стороны все методы измерений поддаются систематизации и обобщению по общим характерным признакам. Рассмотрение и изучение этих признаков помогает не только правильному выбору метода и его сопоставлению с другими, но и существенно облегчает разработку новых методов измерения. Для прямых измерений можно выделить несколько основных методов: метод непосредственной оценки, дифференциальный метод, нулевой метод и метод совпадений. При косвенных измерениях широко применяется преобразование измеряемой величины в процессе измерений. Если мы проанализируем известные нам процессы измерений, то обнаружим, что в подавляющем большинстве случаев мы получаем числовое значение измеряемой величины, только после того, как тем или иным способом видоизменим ее. Рассмотрим в качестве примера измерение массы тела, которую мы измеряем с помощью обыкновенных равноплечих весов. Под действием земного притяжения создаются силы. Масса тела вместе с этими силами давит на одну чашку, а масса гирь - на другую. Подбирая гири, мы добиваемся равновесия, т.е. равенство этих сил. Это дает нам право сказать, что масса взвешиваемого тела равна массе гирь, принимая, что сила земного притяжения на расстоянии между чашками остается одной и той же. Как видим, для измерения массы нам пришлось преобразовать массы тела и гирь в силы, а для сравнения сил между собой преобразовать их действие в механическое перемещение рычагов весов. Приведенный пример показывает, что даже простые измерения проводятся путем преобразования измеряемой величины. Необходимо отметить, что преобразования измеряемых величин всегда таят в себе опасность внесения погрешностей. Например, при взвешивании, описанном выше, мы не учли закона Архимеда, в соответствии с которым вес тела, находящегося в какой - либо среде, уменьшается на вес вытесненного телом объема среды, если плотность материала гирь отличается от плотности вещества взвешиваемого тела. Другими словами, объем вытесненного воздуха различен, при взвешивании влияние этого явления может исказить результат. Правда это влияние оказывается очень небольшим и учитывать его приходится только при точных взвешиваниях, в частности, при взвешивании драгоценных металлов. Основным выводом из сказанного является то, что в подавляющем большинстве случаев измерения связаны с преобразованием измеряемой величины.
1. Измерительные преобразователи. Классификация, принцип действия, электрические схемы, режим работы, метрологические характеристики и области применения
1.1 Метрологические термины и определения
Измерения проводятся с помощью технических средств измерений. Основные виды средств измерений следующие:- мера – средство измерений, предназначенное для воспроизведения физической величины заданного размера, например, мера массы – гиря;- измерительный прибор –это средство измерений, предназначенное для выработки сигнала измерительной информации в форме, доступной для непосредственного восприятия оператором. - измерительный преобразователь –это средство измерений, предназначенное для выработки сигнала измерительной информации в форме, удобной для передачи, дальнейшего преобразования, обработки и хранения, но не подающейся непосредственному восприятию оператором. Измерительные преобразователи в зависимости от их назначения подразделяются на первичные, промежуточные, передающие, масштабные и другие.- первичный измерительный преобразователь – это преобразователь, к которому подведена измеряемая величина. Передающий измерительный преобразователь предназначен для дистанционной передачи сигнала измерительной информации, масштабный измерительный преобразователь – для изменения измеряемой величины в заданное число раз.
- измерительное устройство – это средство измерений, состоящее из измерительных приборов и измерительных преобразователей. В зависимости от назначения измерительные устройства подразделяются на первичные и вторичные. - измерительные информационные системы – это измерительное устройство, которое осуществляет многоканальное измерение и обработку информации по некоторому заданному алгоритму.
1.2 Физические основы преобразователей
1.2.1 Резистивные преобразователи
Реостатные преобразователи
Реостатным преобразователем называют реостат, подвижный контакт которого перемещается в соответствии со значением измеряемой величины. Естественная входная величина реостатного преобразователя - перемещение, выходная - активное сопротивление.
Используют реостатные преобразователи двух основных типов: проволочные и пленочные. Наибольшее распространение получили проволочные преобразователи, схема конструкции которых приведена на рис. 1, а. На неподвижный каркас плотно наматывают изолированный провод, который образует обмотку с сопротивлением R. Обмотка включается в цепь постоянного напряжения V. На обмотке очищается от изоляции "контактная дорожка", по которой может перемещаться щетка 1, жестко закрепленная в щеткодержателе 2. При этом создается скользящая контактная пара: щетка - контактная дорожка. Каркас преобразователя изготавливают из изоляционных материалов: эбонита, текстолита, радиокерамики и других. Наиболее распространенными материалами
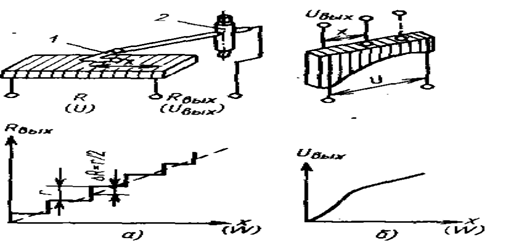
Рис. 1. Реостатные преобразователи
Провода являются манганин, константан, а также сплавы из благородных металлов; золота с никелем, серебра с медью и других. Диаметр провода изменяется, в пределах 0,03-0,1 мм для прецизионных реостатов и достигает 0,3 мм в грубых реостатах. Щетку выполняют в виде двух-трех проволочек диаметром 0,1-0,2 мм. Каркас может иметь не только прямоугольную, но и более сложную форму. Для получения нелинейной характеристики используют фигурные каркасы (рис. 1,6).Статической характеристикой реостатного преобразователя является зависимость Rвых = f(x) или Uвых = ψ(x), где х — перемещение щетки. Эти зависимости могут быть линейными (рис. 1, а) и нелинейными (рис.1, б). На рис.1, а сплошной линией показана реальная характеристика проволочных реостатных преобразователей. Ступенчатый вид характеристики показывает, что при движении щетки в момент перехода от одного витка к другому сопротивление или напряжение изменяется скачками. С помощью ступенчатой кривой определяется порог чувствительности или витковая погрешность преобразователя. Для линейного реостата витковая погрешность определяется.
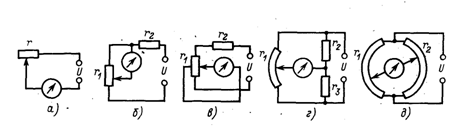
Рис. 2. Схемы включения реостатных преобразователей
Наиболее распространенные схемы включения реостатных преобразователей приведены на рис.2. Недостаток первых трех схем - нелинейная зависимость тока от перемещения движка. Значительно меньшую нелинейность имеют мостовые схемы (рис. 2.г и д).Расчет линейного реостатного преобразователя сводится к определению диаметра и длины намоточного провода, а также геометрических размеров каркаса. Реостатные преобразователи применяют для измерения перемещений. В сочетании с упругими элементами их используют в датчиках для измерения усилий и давлений. Основной недостаток реостатных преобразователей - наличие трущегося контакта, которое приводит, с одной стороны, к уменьшению надежности, с другой — к возникновению погрешности преобразователя вследствие изменения контактного сопротивления. Во многих случаях нежелательное явление — наличие дискретности.
Тензорезисторные преобразователи
В основе работы тензорезисторных преобразователей лежит явление тензоэффекта, заключающееся в изменении активного сопротивления проводников при их механической деформации. Входная величина преобразователя - деформация, выходная - изменение сопротивления. В настоящее время получили распространение проволочные, фольговые и полупроводниковые тензорезисторы. В наиболее простом случае тензорезисторы представляют собой отрезок проволоки, который жестко закреплен при помощи клея или цемента На упругодеформируемой детали. Сжатие или растяжение детали вызывает пропорциональное сжатие или растяжение проволоки, в результате чего изменяются ее длина, поперечное сечение и удельное сопротивление, что в итоге приводит к изменению электрического сопротивления проволоки
R = ρ ![]()
где l - длина;
S — поперечное сечение;
ρ - удельное сопротивление проволоки, то при растяжении ее сопротивление изменится на величину Δ R и составит R + Δ R. Относительное изменение сопротивления тензорезистора равно
![]() =
= ![]() (
l + 2 μ)
(
l + 2 μ)
где ![]() - изменение длины;
- изменение длины;
μ - коэффициент Пуассона:
![]() =
= ![]() :
:
![]() - отношение относительного
поперечного сужения (растяжения) к относительному продольному удлинению
(сжатию). Частное от деления относительного изменения сопротивления
- отношение относительного
поперечного сужения (растяжения) к относительному продольному удлинению
(сжатию). Частное от деления относительного изменения сопротивления ![]() =
= ![]() на относительное изменение
проводника
на относительное изменение
проводника ![]() =
= ![]() - в пределах упругой
деформации характеризуется постоянной величиной, которая называется
коэффициентом тензочувствительности
- в пределах упругой
деформации характеризуется постоянной величиной, которая называется
коэффициентом тензочувствительности ![]() :
: ![]() =
= ![]() = kт Коэффициент тензочувствительности - основная характеристика
тензорезистора. Сопротивление преобразователя не должно изменяться от действия
внешних факторов (температуры и других) более чем на сотые доли процента. Для
измерений приходится применять высокочувствительную аппаратуру- основной
недостаток металлических тензорезисторных преобразователей. Конструктивно
проволочные тензосопротивления представляют собой спираль (решетку), состоящую
из нескольких петель (витков) проволоки, наклеенных на тонкую бумажную
(пленочную) основу (рис. 3). Сверху решетка закрыта также тонкой бумагой или
пленкой. Длина петли lб называется базой преобразователя.
Обычно lб = 8—15 мм. Применяются тензорезисторы с меньшей базой
(до 2,5 мм). Ширина преобразователей от 3 до 10 мм, сопротивление порядка 50 - 150 Ом. Изготавливают преобразователи и больших размеров (до 100 мм), имеющие сопротивление 800 - 1000 Ом.'Промышленность выпускает достаточно разнообразный
ассортимент проволочных тензорезисторов.Более совершенные тензорезисторы -
фольговые. Они имеют решетку в виде тонких полосок фольги прямоугольного
сечения, наносимых на лаковую основу. Из-за большей площади соприкосновения
полосы фольгового тензорезистора с объектом измерения и большой теплоотдачи,
чем у проволочного, он имеет большую чувствительность и по нему можно
пропустить больший ток. Кроме того, преимущество фольговых тензорезисторов в
возможности изготовления решеток любого рисунка, наиболее полно удовлетворяющего
условиям измерений
= kт Коэффициент тензочувствительности - основная характеристика
тензорезистора. Сопротивление преобразователя не должно изменяться от действия
внешних факторов (температуры и других) более чем на сотые доли процента. Для
измерений приходится применять высокочувствительную аппаратуру- основной
недостаток металлических тензорезисторных преобразователей. Конструктивно
проволочные тензосопротивления представляют собой спираль (решетку), состоящую
из нескольких петель (витков) проволоки, наклеенных на тонкую бумажную
(пленочную) основу (рис. 3). Сверху решетка закрыта также тонкой бумагой или
пленкой. Длина петли lб называется базой преобразователя.
Обычно lб = 8—15 мм. Применяются тензорезисторы с меньшей базой
(до 2,5 мм). Ширина преобразователей от 3 до 10 мм, сопротивление порядка 50 - 150 Ом. Изготавливают преобразователи и больших размеров (до 100 мм), имеющие сопротивление 800 - 1000 Ом.'Промышленность выпускает достаточно разнообразный
ассортимент проволочных тензорезисторов.Более совершенные тензорезисторы -
фольговые. Они имеют решетку в виде тонких полосок фольги прямоугольного
сечения, наносимых на лаковую основу. Из-за большей площади соприкосновения
полосы фольгового тензорезистора с объектом измерения и большой теплоотдачи,
чем у проволочного, он имеет большую чувствительность и по нему можно
пропустить больший ток. Кроме того, преимущество фольговых тензорезисторов в
возможности изготовления решеток любого рисунка, наиболее полно удовлетворяющего
условиям измерений
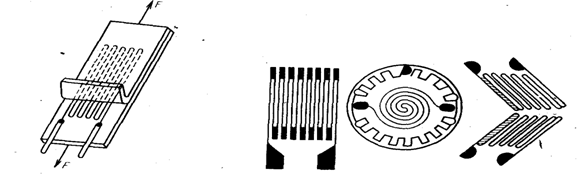
Рис. 3. Проволочный тензорезистор Рис. 4. Фольговые тензорезисторы
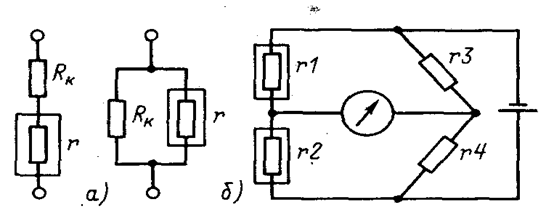
Рис. 5. Схемы включения тензорезисторов.
Основа полупроводниковых тензорезисторов- кристалл кремния или германия. В зависимости от количества примесей типа р или п сопротивление пластинок тснзорезисторов изменяется от 100 Ом до 10 кОм. Знак тензоэффекта (при растяжении) в полупроводниках п-типа проводимости — отрицательный, а р-типа — положительный. Проводимость р-типа имеют тензорезисторы КТД. а n-типа — КТЭ.
Недостаток полупроводниковых тензорезисторов - малые значения прочности и гибкости. Другой недостаток в том, что. несмотря на большую Тензочувствительность. реализовать ее довольно сложно из-за нелинейности характеристик, высокой чувствительности к воздействию внешних условий (температуры, освещения и т.д.) и существенного разброса параметров от образца к образцу.При выборе метода измерения механических величин тензорсзисторам часто отдают предпочтение. Действительно, они являются универсальными преобразователями и могут с успехом использоваться во многих случаях, но они не всегда представляют собой лучшее средство. Тензорезисторныс датчики представляют собой упругий элемент, на который наклеены тензорезисторы. Деформация упругого элемента должна иметь достаточно большую величину. Это обстоятельство часто недооценивается при выборе метода измерения. Так, например, датчик давления, представляющий собой диафрагму с наклеенными на ней тензорезисторами, имеет линейную характеристику только в диапазоне относительно малых деформаций. Индуктивный или емкостный преобразователи в этом случае имеют лучшую линейность при более высоком уровне сигнала. Преобразователи имеют широкую область применения, прежде всего датчики динамометров для измерения усилий. Большинство динамометров представляют собой цилиндрическую колонку, которая подвергается сжатию. Для измерения усилий ниже 1 т обычно применяют кольцевые динамометры с наклеенными тензореэисторами. Для измерения давления применяются датчики с консольной балкой.При изменении температуры возникает погрешность за счет изменения сопротивления от температуры независимо от деформации, т.е. изменение от температуры крутизны градуировочной характеристики, вызванное температурной зависимостью модуля упругости упругого элемента, на который наклеены тензорезисторы, и сопротивления тензорезистора. Температурная коррекция выполняется путем включения последовательно и параллельно с тензорезистором сопротивления с отрицательным температурным коэффициентом (рис.5,а).
Корректирующие сопротивления должны обладать как можно большим температурным коэффициентом, чтобы ею значение было меньше сопротивления тснзорезистора. Этому требованию удовлетворяют только полупроводниковые материалы (термисторы).
Температурная коррекция выполняется также путем включения пар тензорезисторов в смежные плечи моста (рис. 5, б}.
1.2.2 Электромагнитные преобразователи
Индуктивные преобразователи.
Преобразователи, преобразующие естественную входную величину в виде перемещения в изменение индуктивности, называются индуктивными.
Индуктивный преобразователь представляет собой дроссель с изменяющимся воздушным зазором (рис..6. а.) или изменяющейся площадью поперечного сечения (рис.6. б)
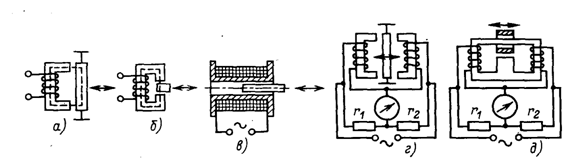
Рис. 6. Конструкция и схемы включения индуктивных пореобразователей.
Выходной параметр индуктивного преобразователя – изменение индуктивности L обмотки, надетой на сердечник, при изменении зазора δ или площади S.
Для измерения больших перемещений применяют индуктивные преобразователи соленоидного типа ( рис.6. в.). Изменение индуктивности в этих преобразователях вызывается перемещением в катушке ферромагнитного сердечника. Соленоидные преобразователи могут применяться для измерения перемещений 100 – 1000 мм.Особенность индуктивных преобразователей в том, что чувствительность их к внешним факторам не зависит от чувствительности к измеряемой величине, поэтому увеличение чувствительности к измеряемой величине приводит к уменьшению погрешности преобразователя.Индуктивные преобразователи применяют для измерения перемещений, толщены покрытий, в микромерах. Изготавливают также индуктивные динаметры и манометры, в которых усилие и давление преобразуется в перемещение при помощи упругих элементов, т.е. промежуточных преобразователей.При эксплуатации индуктивных преобразователей следует учитывать электромеханическую силу, действующую на подвижный сердечник. Поэтому их можно использовать только для измерения достаточно больших сил.Динамические характеристики индуктивных преобразователей определяются в основном параметрами подвижной механической системы, которая чаще всего является колебательной.
Трансформаторные преобразователи.
Преобразователи, преобразующие перемещение в изменение взаимоиндуктивности, называются трансформаторными.
На рис.7. а и б показаны трасформаторные преобразователи с подвижным сердечником.
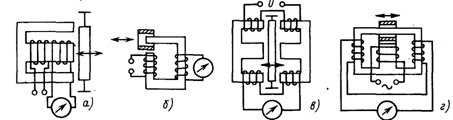
Рис.7. Конструкции и схемы включения трансформаторных преобразователей
Достоинства трансформаторных преобразователей : достаточная мощность сигнала без усилительных устройств, сравнительная простота для измерения усилий и давлений. Трансформаторные преобразователи применяют в сочетании с упругими элементами (мембранами, пружинами).Недостатки индуктивных и трансформаторных преобразователей - в большой инерционности, необходимости регулировки и компенсации начального напряжения на выходе преобразователя. Кроме того, для уменьшения помех оба преобразователя нуждаются в тщательной экранировке, что увеличивает размеры и массу преобразователя. Погрешности трансформаторных преобразователей вызываются в основном нестабильностью напряжения и частоты источника питания, а также влиянием изменения температуры.При измерении динамических процессов частота источника питания должна быть значительно выше частоты измеряемого процесса. При измерении медленно меняющихся процессов преобразователь подключают к источнику питания промышленной частоты.
Магнитоупругие преобразователи.
Преобразователи, основанные на изменении магнитной проницаемости ферромагнитного сердечника под воздействием механической деформации, называют магнитоупругими.Магнитоупругий преобразователь представляет собой ферромагнитный сердечник с одной или двумя обмотками, к которому прикладываются механические усилия. Усилие создает в сердечнике механическое напряжение, которое приводит к изменению магнитной проницаемости μ и, следовательно, к изменению магнитного сопротивления, что обуславливает изменение электрического сопротивления Z катушки. Таким образом, в магнитоупругом преобразователе имеется следующая цепь преобразований:F → σ → μ → R → Z или e. Магнитоупругий эффект объясняется дополнительным магнитным взаимодействием атомом вследствие искажения атомной решетки кристалла от воздействия механических усилий. В общем случае зависимость магнитной проницаемости от механических напряжений имеет довольно нелинейный характер. Однако, выбирая оптимальные режимы работы, можно получить относительно линейную зависимость.
Существует большое разнообразие конструктивных форм магнитоупругих преобразователей. Их можно разбить на две основные группы: преобразователи дроссельного и трансформаторного типов.В преобразователях дроссельного типа изменение магнитной проницаемости сердечника приводит к изменению полного электрического сопротивления катушки дросселя.В преобразователях трансформаторного типа в качестве выходной величины используется взаимная индуктивность. Такие пореобразователи – по существу трансформаторные с переменным коэффициентом трансформации. Конструкции основных типов магнитоупругих преобразователей показаны на рис. 8.
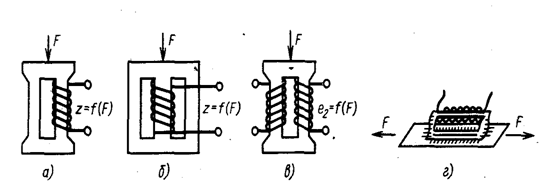
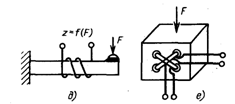
Рис.8. Конструкции магнитоупругих преобразователей.
Сердечник преобразователя при измерении сосредоточенных сил может претерпевать деформацию сжатия (растяжения) (рис. 8. а, б, и в ) или изгиба (рис.8.д.). На рис.8.г. изображен тензометрический магнитоупругий преобразователь, магнитная цепь которого выполнена из тонкого листа пермаллоя, наклеенного на исследуемую деталь.
В преобразователях, приведенных на рис.8. а-д, используется эффект изменение магнитной проницаемости сердечника в одном направлении. В настоящее время широкое применение получили магнитоупругие преобразователи, в которых используется изменение магнитной проницаемости одновременно в двух взаимно перпендикулярных направлениях, т.е. магнитная анизотропия сердечника. На рис.8. е показана конструкция магнитноанизотропного преобразователя со скрещенными обмотками. Первичная и вторичная обмотки расположены в сплошном магнитопроводе под прямым углом друг к другу. В ненагруженном состоянии преобразователя силовые линии первичной обмотки не пересекают вторичную обмотку, в результате чего ЭДС вторичной обмотки равно нулю. При действии усилия вследствие изменения магнитной проницаемости материала магнитное поле вытягивается в направлении большей проницаемости, сжимается в направлении меньшей проницаемости и, сцепляясь со вторичной обмоткой, индуцирует в ней ЭДС, пропорциональную приложенному усилию.
Магнитострикционный эффект – четный эффект, т.е. знак деформации сердечника не меняется при перемене направления поля на обратное. Частота изменения деформаций или колебаний сердечника в 2 раза больше частоты переменного тока, протекающего через обмотку преобразователя. На магнитострикционном эффекте основана работа магнитострикционных ультразвуковых преобразователей или излучателей.
Основные достоинства магнитоупругих преобразователей: высокие мощность и уровень выходного сигнала, надежность, простота конструкции. Однко магнитоупругие преобразователи обладают довольно большими погрешностями. Основные источники погрешностей: температурная погрешность и магнитоупругий гистерезис. При быстроизменяющихся усилий следует учитывать также инерционность магнитоупругих преобразователей.
Индукционные преобразователи.
Преобразователи, в которых используется яление электромагнитной индукции, т.е. наведение ЭДС в электрическом контуре при изменении магнитного потока, называются индукционными.По принципу действия индукционные преобразователи подразделяются на две группы.В преобразователях первой группы магнитное сопротивление постоянного магнитного потока остается неизменным, а индуцированная ЭДС наводится из-за линейных или угловых перемещений сердечника катушки в зазоре ( рис. 9.).
Н1
![]()
![]()
![]()
![]() UIII
UIII
![]()
![]()
![]() К1
К1
![]()
![]()
![]() UII = UIII - UIIII
UII = UIII - UIIII
![]() U1
U1
![]()
![]()
![]()
![]() Н2
Н2
![]()
![]() UIIII
UIIII
![]()
![]()
![]() К2
К2
От ЧЭ Рис. 9. Индукционный преобразователь.
В некоторых конструкциях перемещается катушка. Конструктивно преобразователь представляет собой катушку, имеющую три обмотки.
Первичная обмотка
равномерно распределена по всей длине. Две вторичные обмотки выполнены в виде
отдельных секций с одинаковым числом витков. Внутри каркаса размещен сердечник,
связанный со штоком чувствительного элемента.![]() ,
где:
,
где:![]() - ЭДС верхней вторичной
обмотки;
- ЭДС верхней вторичной
обмотки;![]() - ЭДС нижней вторичной
обмотки;К – коэффициент продолжительности;
- ЭДС нижней вторичной
обмотки;К – коэффициент продолжительности;![]() - частота переменного напряжения,
подаваемого на первичную обмотку;
- частота переменного напряжения,
подаваемого на первичную обмотку;![]() - напряжение
первичной обмотки;М – взаимоиндуктивность первичной и вторичных обмоток.Так как
вторичные обмотки включены встречно, то суммарное напряжение на выходе
преобразователя в среднем положении сердечникаравно нулю:
- напряжение
первичной обмотки;М – взаимоиндуктивность первичной и вторичных обмоток.Так как
вторичные обмотки включены встречно, то суммарное напряжение на выходе
преобразователя в среднем положении сердечникаравно нулю:![]() .При изменении давления
сердечник перемещается, например, вверх. Вследствие этого взаимоиндуктивность
катушек изменяется на
.При изменении давления
сердечник перемещается, например, вверх. Вследствие этого взаимоиндуктивность
катушек изменяется на ![]() . ЭДС во
вторичных обмотках будут иметь:
. ЭДС во
вторичных обмотках будут иметь:![]()
![]() На выходе преобразователя будет
действовать напряжение
На выходе преобразователя будет
действовать напряжение![]()
При перемещении сердечника
вниз на выходе преобразователя действует напряжение ![]() Изменение
взаимоиндуктивности
Изменение
взаимоиндуктивности ![]() пропорционально
изменению положения сердечника
пропорционально
изменению положения сердечника ![]() :
:![]() .
.
Таким образом, величина действующего напряжения Uii определяется перемещением сердечника и пропорциональна этому перемещению.
В преобразователях второй группы магнит и катушка неподвижны. А индуцированная ЭДС наводится путем изменения магнитного потока вследствие колебания магнитного сопротивления магнитной цепи, создаваемых чаще всего изменением воздушного зазора этой цепи
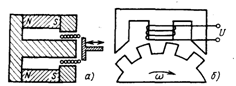
Рис. 10. Конструкции индукционных преобразователей.
При вращении ротора происходит изменение сопротивления магнитной цепи с частотой, определяемой скорость вращения и числом зубцов. Индукционные преобразователи, предназначенные для измерения скорости вращения, называют тахогенераторами. Тахогенераторы – это электрические машины, работающие в генераторном режиме и служащие для преобразования скорости вращения в пропорциональный электрический сигнал.
1.2.3 Емкостные преобразователи
В основу работы емкостного преобразователя положено изменение его емкости под действием входной измеряемой величины. Емкость плоского конденсатора, как известно, выражается формулой
![]() =
= ![]() S / δ где
S / δ где ![]() — диэлектрическая проницаемость среды между
обкладками; S — площадь поверхности обкладки;
δ - расстояние между обкладками, или толщина диэлектрика. Таким образом,
изменение емкости преобразователя можно получить, изменяя:1) расстояние между
обкладками (рис. 11, а); 2) площадь электродов, образующих емкость (рис. 11,6);
3) диэлектрическую проницаемость диэлектрика (рис. 11, в). Как видно из формулы
зависимость емкости от диэлектрической проницаемости и площади пластин имеет
линейный характер, а от расстояния между пластинами - нелинейный,
гиперболический характер.Если обозначить емкость, в отсутствие измеряемой
величины через
— диэлектрическая проницаемость среды между
обкладками; S — площадь поверхности обкладки;
δ - расстояние между обкладками, или толщина диэлектрика. Таким образом,
изменение емкости преобразователя можно получить, изменяя:1) расстояние между
обкладками (рис. 11, а); 2) площадь электродов, образующих емкость (рис. 11,6);
3) диэлектрическую проницаемость диэлектрика (рис. 11, в). Как видно из формулы
зависимость емкости от диэлектрической проницаемости и площади пластин имеет
линейный характер, а от расстояния между пластинами - нелинейный,
гиперболический характер.Если обозначить емкость, в отсутствие измеряемой
величины через ![]() , а в момент
измерения
, а в момент
измерения ![]() , то изменение емкости
составляет:
, то изменение емкости
составляет:![]() =
= ![]() –
– ![]()
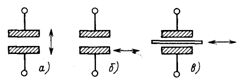
Рис.11. Основные типы емкостных преобразователей
Емкостные преобразователи с изменяющимся воздушным зазором используют для измерения малых перемещений (от долей микрометра до долей миллиметра), для измерения силы, давления при наличии промежуточных преобразователей силы и давления в перемещение.
Преобразователи с изменяющейся площадью применяют для измерения больших. линейных и угловых перемещений.
Преобразователи с изменяющейся диэлектрической проницаемостью чаще всего используют для измерения влажности твердых тел (тканей, пластмасс), сыпучих тел, аморфных (например, мазута), а также для измерения уровней, толщины изоляционных материалов, усилий. В последнем случае используется свойство сегнетоэлектриков, применяемых в качестве диэлектрика в преобразователе, изменять диэлектрическую проницаемость под действием сжимающей силы. Их применяют только для измерения сравнительно больших усилий. Достоинства емкостных преобразователей: высокая чувствительность, простота конструкции, малая инерционность. Наряду с этим емкостным преобразователям присущи и недостатки: 1) большое внутреннее сопротивление, что вызывает необходимость производить питание током высокой частоты; 2) необходимость тщательной экранировки для уменьшения влияния внешних электрических полей и паразитных емкостей.
1.2.4 Пьезоэлектрические преобразователи
Пьезоэлектрические преобразователи - преобразователи генераторного типа. Принцип действия их основан на явлении пьезоэлектричества, характерного для определенного класса кристаллов, не имеющих центра симметрии. Пьезоэлектрические кристаллы обладают прямым пьезоэффектом, заключающимся в появлении поляризации при действии давления, и обратным, заключающимся в том, что кристаллы деформируются в электрическом поле.
На использовании прямого пьезоэффекта строятся преобразователи усилий, ускорений, давлений; обратного - вибраторы, ультразвуковые излучатели и другие устройства. В пьезоэлектрических трансформаторах и преобразователях на их основе используется совместное действие прямого и обратного пьезоэффектов. В настоящее время получено большое число пьезоэлектрических материалов, которые подразделяют на две основные группы: пьезоэлектрические монокристаллы и поликристаллические материалы или пьезокерамика. Среди монокристаллических пьезоэлектриков особое место занимает кварц. Он обладает высокими значениями добротности и стабильности характеристик, Недостаток кварца — низкое значение диэлектрической проницаемости и коэффициента электромеханической связи, что ограничивает его применение в пьезоэлектрических преобразователях некоторых типов. В последнее время широкое применение находят искусственно выращиваемые монокристаллы ниобита лития, германата висмута и силиката висмута, которые имеют более высокие значения коэффициента электромеханической связи и диэлектрической проницаемости по сравнению с кварцем. Кроме того, ниобат лития обладает очень высокой температурой Кюри, а германосилиниты не имеют температуры фазового перехода, поэтому они успешно используются в условиях высоких температур.
Пьезокерамические материалы получены трех разновидностей: титанат бария, соединения ниобата свинца и соединения цирконата, титаната свинца. Пьезокерамика имеет высокие значения пьезоэлектрических характеристик. Вместе с тем пьезо-элементы из пьезокерамики дешевы в изготовлении и технологичны. Недостатки пьезокерамики - более низкие по сравнению с монокристаллами временная и температурная стабильности. Пьезоэлектрический преобразователь в обычном исполнении представляет собой пьезоэлектрическую пластинку, к электродам которой подключен вольтметр, а к граням прикладывается измеряемое усилие (рис. 12).
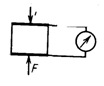
Рис.12. Пьезоэлектрический преобразователь динамических усилий
Такие преобразователи применяют только для измерения динамических усилий и не применяют для измерения статических и медленно меняющихся нагрузок. В системах автоматики промышленных производств приходится иметь дело, как правило, с медленно изменяющимися технологическими параметрами, поэтому они не нашли широкого применения в промышленности. Воздействие на преобразователь измеряемой величины осуществляется следующими способами: изменением размеров, плотности и упругих свойств самого пьезоэлемента, а также изменением акустического сопротивления (импеданса) среды, контактирующей с пьсэоэлементом, которое определяется ее плотностью, скоростью звука, контактной жесткостью и площадью контакта пьезоэлемента со средой.
В зависимости от вида воздействия на преобразователь измеряемой величины существуют различные виды пьезоэлектрических преобразователей статических нагрузок.
На основе изменения размеров, плотности и упругих свойств пьезоэлемента от воздействия измеряемой величины строятся тензочувствитсльные, термочувствительные и масс-чувствительные преобразователи. На основе изменения акустического сопротивления среды, контактирующей с пьезоэлементом, строятся пьезоэлектрические преобразователи с изменяющимся акустическим импедансом. Выходной сигнал тензочувствительных, термочувствительных и масс-чувствительных преобразователей - изменение частоты колебаний автогенератора, в частотозадающую цепь которого включен резонатор (рис. 13).

Рис. 12. Схема включения тензочувствительных пьезоэлектрических преобразователей
Пьезоэлектрические преобразователи с изменяющимся акустическим импедансом строят на основе пьезоэлектрических резонаторов и пьезоэлектрических трансформаторов. Об измеряемом усилии судят либо по изменению тока в цепи пьезорезонатора либо по изменению выходного напряжения или сдвига фаз между входным и выходным напряжениями пьезотрансформатора. Пьезорезонаторы и пьезотрансформаторы включаются также в частотозадающую цепь автогенератора В этом случае об измеряемом усилии судят по изменению частоты колебаний или напряжения на выходе автогенератора. Измеряемая нагрузка прикладывается либо непосредственно к пьезорезонатору или пьезотрансформатору, либо к сочлененному с ними акустическому чувствительному элементу. В первом случае преобразователи называют контактными преобразователями, во втором — преобразователями с акустическими чувствительными элементами.
Пьезоэлектрические преобразователи с изменяющимся акустическим импедансом применяют для измерения широкого круга механических величин, параметров жидкостей и газов, а также электрических и магнитных величин.
Тензочувствительные преобразователи
Тензочувствительностью или силочувствительностыо пьезоэлектрического резонатора называют зависимость его резонансной частоты от силы или деформации, определяемой силовым воздействием. Преобразователь может характеризоваться как преобразователь силы в частоту, либо как преобразователь деформации в частоту.
Изменение частоты при
деформациях пьезорезонатора определяется уровнем и характером механических
напряжений, поэтому более точно характеризует физическую сущность
преобразования коэффициент тензочувствительности ![]() =
= ![]() ;
;
Тензочувствительные преобразователи строятся главным образом на основе пьезорезонаторов, в которых возбуждаются колебания сдвига по толщине и колебания изгибаю Тенэочувствительные преобразователи, использующие колебания сдвига по толщине, выполняют в виде прямоугольных пластин, стержней, круглых линз, в центральной части которых размещаются электроды
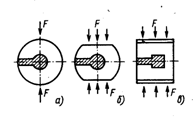
Рис.14. Тензочувствитеьные пьезорезонаторы с возбуждением колебаний сдвига.
Толщина пьезоэлементов в зависимости от резонансной частоты выбирается 0,05 - 33 мм при поперечных размерах 3—30 мм. Кроме того, вклад в тезночувствительность дает также изменение упругих свойств пьезоэлемента. Изменение частоты зависит от направления прикладываемой нагрузки.
Термочувствительные преобразователи.
Под термочувствительностью пьезоэлектрического резонатора понимается зависимость его резонансной частоты от температуры. Коэффициент термочувствительности можно представить как производную от частоты по температуре
Конструктивно
термочувствительные пьезорезонаторы выполняются в виде пластин или линз подобно
тензочувствительным. Термочувствительность кварцевых пьезорезонаторов зависит
от типа среза. Минимальную зависимость имеют кварцевые резонаторы АТ-среза,
которые применяются в тензочувствительных преобразователях. Коэффициент
термочувствительности увеличивается пропорционально частоте резонатора, поэтому
в измерительных преобразователях используются высокочастотные резонаторы с
колебаниями сдвига по толщине. Для резонаторов ![]() -срезов
экспериментальные значения термочувствительности достигаются при углах
-срезов
экспериментальные значения термочувствительности достигаются при углах ![]() ≈ +5° и
≈ +5° и ![]() ≈ +70°. Высокой
термочувствительностью обладают резонаторы из ниобата лития при возбуждении
колебаний по толщине.
≈ +70°. Высокой
термочувствительностью обладают резонаторы из ниобата лития при возбуждении
колебаний по толщине.
1.2.5 Тепловые преобразователи
Тепловыми называют преобразователь, принцип действия которого основан на тепловых процессах. Естественная входная величина его – температура. К таким преобразователям относятся термоэлектрические преобразователи и терморезисторы.
Термоэлектрические преобразователи.
Принцип действия термоэлектрических преобразователей или термопар основан на явлении термоэлектрического эффекта, которое заключается в том, что в цепи из двух различных проводников (или полупроводников), соединенных между собой концами при разности температур соединений возникает ЭДС, называемая термоэлектродвижущей силой (термо-ЭДС). Такая цепь называется термоэлектрическим преобразователем или термопарой. Проводники, составляющие термопару, называются термоэлектродами, а места их соединения спаями. Рабочий конец термопары, помещенный в измеряемую среду, называют горчим спаем, а свободный (нерабочий) – холодным. Один из термоэлектродов называется термоположительным, а второй – термоотрицательным. Термоположительным называют тот проводник, от которого термоток течет в холодном спае, а термоотрицательным – тот проводник, к которому течет термоток в том же холодном спае.При небольшом перепаде температур между спаями термо-ЭДС пропорциональна разности температур. Величина термо-ЭДС зависит только от природы проводников и от температуры спаев и не зависит от распределения температур между спаями.Явление термоэлектричества принадлежит к числу обратных явлений. Если через цепь, состоящую из двух различных проводников или полупроводников, пропустить электрический ток, то в одном спае выделяется тепло, а на другом поглощается.
На рис.1 изображена электрическая цепь, состоящая из двух разнородных проводников.


![]()
![]()

![]()
 t0, 0C
t0, 0C
![]()
![]()



 n 1 2 n
n 1 2 n
t, 0C
Рис.1. Электрическая цепь термопары.
![]() ,
, ![]() –
разнородные проводники. 1,2 –места соединений, называемые спаями.
–
разнородные проводники. 1,2 –места соединений, называемые спаями.
В разнородных проводниках количество свободных электронов на единицу объема различно.
Определение зависимости
ЭДС термопары (![]() ) от температуры
рабочего спая при заданном значении свободного спая и для выбранных материалов
термоэлектродов
) от температуры
рабочего спая при заданном значении свободного спая и для выбранных материалов
термоэлектродов ![]() и
и ![]() называется градурировкой
термопары.
называется градурировкой
термопары.
Для измерения ЭДС термопары прибор устанавливают в свободном спае (рис.2)
![]()
![]()


![]()
![]() n
n


![]()
![]()
 n 1 t0, 0С 0С
n 1 t0, 0С 0С
![]()
![]()
![]() n
n
Рис. 2. Схема измерения ЭДС термопары.
Терморезисторы.
Терморезистор представляет собой проводник или полупроводник, сопротивление которого достаточно сильно зависит от температуры. Большинство химически чистых металлов обладает положительным температурным коэффициентом сопротивления ТКС.
Для изготовления терморезисторов применяют материалы, обладающие::высокостабильным ТКС;линейной зависимостью сопротивления от температуры ;инертностью к воздействию окружающей среды;хорошей воспроизводимостью свойств.К таким материалам в первую очередь относятся платина и медь. Применяются также вольфрам и никель.Платиновые терморезисторы применяются в диапазоне температур от –2000 до +6500С и выше. Медные терморезисторы применяются в диапозоне температур от –500 до +2000С. При более высоких температурах медь окисляется.
Зависимость сопротивления от температуры платиновых терморезисторов практически линейная. Полупроводниковые терморезисторы имеют более высокую чувствительность. Температурный коэффициент сопротивления полупроводниковых терморезисторов 3 · 10-2 – 4 · 10-2 1/град. Он отрицателен и уменьшается пропорционально квадрату абсолютной температуры.где А и В - постоянные коэффициенты, зависящие от физических свойств проводника.Для изготовления полупроводниковых терморезисторов применяют кристаллы некоторых металлов (например, германия) и окислы титана, магния, никеля, меди и др.
1.2.6 Элетрохимические преобразователи
Электрохимический преобразователь представляет собой электролитичекую ячейку, заполненную раствором, с помещенными в ней двумя или несколькими электродами, служащими для включения преобразователя в электрическую цепь. Как элемент электрической цепи электолитическая ячейка характеризуется сопротивлением, емкостью, индуктивностью, падением напряжения от проходящего тока, развиваемой ЭДС.
Выделяя зависимость одного из этих электрических параметров от измеряемой неэлектрической величины, создают электрохимические преобразователи для измерения и контроля концентрации, давления, перемещения и других неэлектрических величин.
Гальванические преобразователи.
Принцип действия гальванических измерительных преобразователей основан на зависимости электродных потенциалов, т.е. гальванической ЭДС, от состава и концентрации растворов. Наиболее широкое применение они получили для измерения и контроля активности водородных ионов, по которой определяют состав и свойства раствораов.
Электропроводность воды обусловлена тем, что ее молекулы часто диссоциируют на ионы водорода Н+ и ионы гидрокисла ОН¯ :
Н2О = Н+ + ОН¯.
При этом в воде и водных растворах ионное произведение воды
![]() = αн
+ αон
= αн
+ αон
является величиной постоянной, при 220С равной 10-14.
В чистой воде или нейтральном растворе активности Н+ и ОН¯ равны
αн =
αон = ![]() = 10-7
г·ион/л.
= 10-7
г·ион/л.
В кислотном растворе
больше ионов Н+, чем ОН¯, но производение
их активностей остается равным ионному произведению воды ![]() . В щелочных растворах
больше ионов ОН¯, чем Н+. Таким образом, у кислотных
растворов
. В щелочных растворах
больше ионов ОН¯, чем Н+. Таким образом, у кислотных
растворов
αн > αон, а у щелочных - αон > αн.
Следовательно, для характеристики раствора достаточно знать активность водородных ионов, которую характеризуют отрицательным логарифмом активности ионов водорода – водородным показателем рН:
РН = lg αн.
Приборы для измерения этого называют рН-метрами.
1.2.7. Оптические преобразователи
Оптический преобразователь содержит источник излучения – оптический канал и приемник излучения. Измеряемая величина воздействует либо непосредственно на источник излучения, изменяя его параметры, либо на поток излучения в процессе его распространения по оптическому каналу. В качестве источников оптического излучения применяют тепловые и люминесцентные источники.
ЛИТЕРАТУРА
1. Трофимов А.Н. Автоматика, телемеханика, вычислительная техника в химических производствах. Учебник. Энергоатомиздат. 1985.
2. Фарзане Н.Г., Илясов П.В., Азим-заде А.Ю. Технологические измерения и приборы. Учебник. Москва. Высшая школа.1989.
3. Жарковский Б.И. Приборы автоматического контроля и управления. Учебник. Высшая школа. 1989.
4. Попов И.А., Грунтович Н.В. Сборник заданий для самостоятельной работы по основам теории автоматического управления (регулирования). Учебное пособие. ВМФ. 1982.
5. Трофимов В.В. Справочник АСУТП. Справочник. Киев. Техника. 1988.
6. Измерительно-информационные системы. Учебник. ВМФ. Ч.1. 1990 г.
7. Гершунский Б.С. Основы электроники и микроэлектроники. Киев.Вища шк.1987.
Перепечатка материалов без ссылки на наш сайт запрещена