Курсовая работа: Побудова системи передачі даних з розрахунком її структурних елементів
Курсовая работа: Побудова системи передачі даних з розрахунком її структурних елементів
ЗмістВступ 2
1. Загальні відомості про системи передачі інформації 3
2. Розрахунок структурних елементів системи передачі інформації 7
2.1 Розрахунок джерела повідомлення. 7
2.2 Розрахунок кодера джерела повідомлення. 10
2.3 Розрахунок кодера каналу. 15
2.4 Розрахунок модулятора. 22
2.5 Розрахунок каналу зв’язку. 31
2.6 Розрахунок демодулятора. 33
2.7 Розрахунок декодера каналу. 34
Висновки. 40
Список використаних джерел. 41
Вступ
В наш час широкого розповсюдження системи передачі даних різного призначення. На теперішній час ми використовуємо їх навіть у побуті для дистанційного керування приладами. При цьому слід не забувати, що будь-яка система передачі даних це набір функціональних вузлів які забезпечують її роботу із необхідними характеристиками. А саме: інформативністю джерела інформації, ймовірністю правильної передачі та прийому інформації, а також шириною каналу зв’язку. Останнє є особливо актуальним, оскільки велика кількість систем вимагає узгодження їх роботи з метою уникнення створення взаємних перешкод.
Питаннями вивчення особливостей передачі та прийому інформації, оцінки її кількості та інш. займається наука, яку називають по різному: теорія інформації, математична теорія зв’язку.
Застосування постулатів зазначеної науки дозволяє на етапі проектування здійснити розрахунок основних елементів системи передачі даних з метою визначення та забезпечення її найкращих характеристик.
Саме етапу попереднього проектування і присвячено дану курсову роботу. В роботі буде розглянуто загальний варіант побудови системи передачі даних з розрахунком її структурних елементів.
1. Загальні відомості про системи передачі інформації
Системою передачі даних (СПД) називають функціонально об’єднану сукупність пристроїв і ланок, за допомогою яких можна передавати повідомлення з одного пункту до іншого.
Як приклад розглянемо роботу одно канальної СПД (рис 1.1) [5, 8].
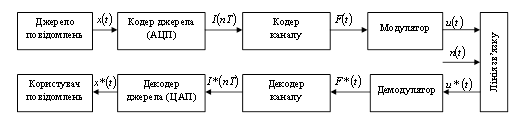
Рисунок 1.1 Структурна схема системи передачі інформації.
Як видно з рисунка 1.1 джерело повідомлень формує аналоговий сигнал, наприклад аналогове значення температури на певному об’єкті. Даний сигнал описується функцією аналогового параметра від часу
|
|
(1.1) |
Безпосередньо передавати повідомлення по лінії зв’язку можливо лише у деяких випадках. У більшості випадків повідомлення, що передаються необхідно перетворювати в сигнали, які грають роль передавача інформації по фізичних лініях зв’язку. Таке перетворення виконується у передавальному пристрої і в загальному випадку складається з двох процедур: кодування та модуляції [5, 8].
При побудові системи передачі інформації необхідно враховувати ряд факторів серед яких основними є особливості первинних сигналів [8]. На сучасному етапі розвитку радіоелектронних технологій все частіше намагаються перетворювати аналогові сигнали до цифрової форми, що дозволяє значно спростити процес їх передачі та обробки. Це робить будь-які джерела інформації дискретними [5]. Використання дискретного джерела повідомлень вимагає наявності у схемі кодера джерела, який призначено для перетворення аналогового сигналу до цифрового або іншого вигляду, що дозволяє зробити обробку інформації більш зручною. В якості такого кодеру зазвичай використовуються аналогово-цифрові перетворювачі (АЦП). Таким чином, кодер джерела повідомлень забезпечує перетворення аналогового сигналу в цифрову форму, яку можна записати у вигляді дискретних інформаційних посилок
|
|
(1.2) |
де ![]() – оператор дискретизації з періодом
– оператор дискретизації з періодом ![]() .
.
Іншою метою кодування є зменшення впливу різних перешкод і викривлень на передавання повідомлень. Існує велика кількість видів перешкодостійких кодів [8], в даній курсовій роботі буде розглянуто циклічний код з можливістю виявлення двократних та виправлення однократних помилок. На основі дискретних посилок інформації джерела в кодері каналу формується послідовність бінарного коду, яка містить закодовані повідомлення і може бути описана функціональною залежністю
|
|
(1.3) |
Залежно від виду
каналу зв’язку різні види сигналів мають різні умови передачі. Так наприклад,
використання провідних каналів може забезпечувати передачу лише низькочастотних
сигналів, оскільки в протилежному випадку значно зростає потужність втрат
каналу [4]. Використання радіоканалів вимагає
перетворення відеосигналів у радіосигнали, особливості розповсюдження яких
залежать від частоти. Крім того, використання модульованих сигналів забезпечує
підвищення перешкодостійкості сигналу при передачі його каналом зв’язку [8]. Тому в системі передачі інформації
обов’язковим є наявність модулятора, на виході якого формується радіосигнал ![]() .
.
При передачі сигналу каналом зв’язку на нього впливатимуть перешкоди. В найпростішому випадку це внутрішні шуми лінійного тракту приймального та передавального пристрою, а також шуми атмосфери чи іншого середовища в якому відбувається передача сигналу. Такі перешкоди є адитивними і сигнал на вході демодулятора можна описати функціональною залежністю
|
|
(1.4) |
де ![]() – функціональна залежність перешкод, що
впливають на сигнал.
– функціональна залежність перешкод, що
впливають на сигнал.
В такому випадку
на виході демодулятора буде формуватися відеосигнал у вигляді спотвореної
послідовності двійкових символів, який позначено, як ![]() . В ідеальному випадку, на виході
декодера каналу всі помилки буде усунено, але існує деяка ймовірність, що
кратність помилок буде більшою за можливість коду і в такому випадку на вході
декодера джерела будуть інформаційні повідомлення з помилками, що призведе до
невірності отримань повідомлень користувачем інформації. Слід відмітити, що
застосування додаткових елементів СПД, а саме кодера каналу та модулятора
дозволяє значно зменшити ймовірність помилки у прийнятому повідомленні.
. В ідеальному випадку, на виході
декодера каналу всі помилки буде усунено, але існує деяка ймовірність, що
кратність помилок буде більшою за можливість коду і в такому випадку на вході
декодера джерела будуть інформаційні повідомлення з помилками, що призведе до
невірності отримань повідомлень користувачем інформації. Слід відмітити, що
застосування додаткових елементів СПД, а саме кодера каналу та модулятора
дозволяє значно зменшити ймовірність помилки у прийнятому повідомленні.
Таким чином, в даному розділі запропоновано структурну схему СПД, яка містить всі традиційні елементи, що дозволяє здійснити отримання аналогового повідомлення від джерела інформації, здійснити його перетворення у цифрову форму та забезпечити передачу каналом зв’язку із зменшеною ймовірність виникнення помилок.
2. Розрахунок структурних елементів системи передачі інформації
2.1 Розрахунок джерела повідомлення
Джерело
повідомлень формує повідомлення ![]() , що представляє собою
безперервний стаціонарний випадковий процес, миттєві значення якого в інтервалі
, що представляє собою
безперервний стаціонарний випадковий процес, миттєві значення якого в інтервалі
![]() В
розподілені за рівномірним законом, а енергія зосереджена в смузі частот від 0
до 1 кГц
В
розподілені за рівномірним законом, а енергія зосереджена в смузі частот від 0
до 1 кГц
Аналітичний вигляд функції для щільності розподілу ймовірностей джерела повідомлень має вигляд [2]
|
|
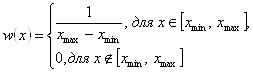
Здійснимо побудову графіка щільності розподілу ймовірностей відповідно до виразу (2.1). Для цього скористуємось середовищем MathCad. Результат наведено на рисунку 2.1.
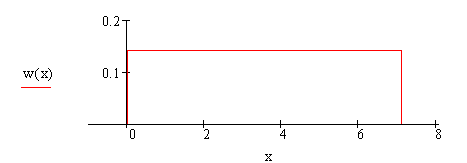
Рисунок 2.1 Функція щільності розподілу ймовірності
Для побудови графіка випадкового процесу на виході джерела повідомлень можна використати один із методів статистичного моделювання [3]. Так для моделювання випадкового процесу, який має рівномірний закон розподілу можливо скористатися наступною математичною моделлю:
|
|
(2.2) |
де ![]() – випадкова величина, яку можна
отримати за одним з алгоритмів [3]. В середовищі MathCad для отримання випадкової величини
– випадкова величина, яку можна
отримати за одним з алгоритмів [3]. В середовищі MathCad для отримання випадкової величини ![]() можна
використати стандартну функцію. Результат моделювання вихідного сигналу
наведено на рисунку 2.2
можна
використати стандартну функцію. Результат моделювання вихідного сигналу
наведено на рисунку 2.2
Рисунок 2.2 Графік вихідного сигналу джерела
Як видно з рисунка 2.2, на ньому окрім вихідного сигналу показано також його характеристики, а саме:
1. Математичне очікування [2], яке можна розрахувати за виразом:
|
|
Дисперсія, визначається за виразом:
|
|
2. Середньоквадратичне відхилення, вираз:
|
|
(2.5) |
З графіка видно,
що математичне очікування сигналу відповідає центральному значенню діапазону та
становить 3,55 В. В результаті підрахунку дисперсії сигналу отримано величину
4,201 В2, відповідно середньоквадратичне відхилення становить 2,05
В. З графіка видно, що основні значення сигналу зосереджено в діапазоні ![]() .
.
2.2 Розрахунок кодера джерела повідомлення
На теперішній час спостерігається бурхливий розвиток цифрових технологій, тому існує тенденція до обробки та передачі в СПД дискретних сигналі, що вимагає дискретизації вихідних сигналів джерел інформації.
В роботі запропоновано використовувати кодер джерела, який забезпечує квантування його сигналу з заміною значення на найменший рівень квантування [7]. Епюри вхідних та вихідних сигналів такого кодера наведено на рисунку 2.3.
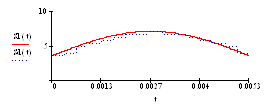
Рисунок 2.3 Епюри роботи кодера джерела.
Аналіз рисунку 2.3 свідчить, що кодер забезпечує перетворення аналогового сигналу джерела інформації в дискретну форму, з періодом дискретизації, який можна визначити за теоремою Котельникова-Железнова [7]
|
|
(2.6) |
що після підрахунків становить 3,33х10-4 с.
Завданням на курсову роботу зазначено, що кодер має 16 рівнів квантування за рівнем, таким чином, якщо в якості кодера джерела використовується звичайний АЦП, то визначити його розрядність можливо за виразом [6]:
|
|
(2.7) |
що становить 4 розряди, а крок квантування напруги за рівнем:
|
|
використовуючи
відомі значення, отримуємо ![]() 0,444 В.
0,444 В.
З урахуванням використання в якості вихідного коду АЦП рівномірного двійкового коду можемо записати таблицю рівнів АЦП
|
|
0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 |
|
|
0 | 0,444 | 0,888 | 1,332 | 1,776 | 2,22 | 2,664 | 3,108 | 3,552 | 3,996 | 4,44 | 4,884 | 5,328 | 5,772 | 6,216 | 6,66 |
| Код | 0000 | 0001 | 0010 | 0011 | 0100 | 0101 | 0110 | 0111 | 1000 | 1001 | 1010 | 1011 | 1100 | 1101 | 1110 | 1111 |
Відомі значення періоду дискретизації та розрядності АЦП дають можливість визначити продуктивність кодера джерела, що здійснюється за виразом:
|
|
Підставивши до
виразу (2.9) значення відповідних параметрів, які розраховані раніше, отримаємо
![]() 12 кбіт/с. Відповідно, тривалість
однієї дискрети вихідного двійкового коду, яка може бути розрахована за виразом
–
12 кбіт/с. Відповідно, тривалість
однієї дискрети вихідного двійкового коду, яка може бути розрахована за виразом
–
|
|
(2.10) |
становить 8,3х10-5 с.
З рисунку 2.3 видно, що за рахунок квантованості вихідного сигналу частина інформації про вхідний сигнал буде втрачатися. Вказане явище називають шумом квантування [5]. Його потужність не залежить від амплітуди аналогового сигналу та може бути визначена за виразом
|
|
За результатами розрахунків, величина потужності шуму квантування становить 0,016 В2
Оскільки джерело інформації має рівномірний закон розподілу ймовірності появи значень сигналу, то для визначення ентропії джерела можемо використати спрощений вираз [5]
|
|
(2.12) |
що після підрахунків становить 4 біт/повідомлення.
Таким чином в даному пункті розраховано основні параметри кодера джерела повідомлення в якості якого пропонується використовувати 4-розрядний АЦП з кроком квантування 0,444 В та часом дискретизації 3,33х10-4 с.
2.3 Розрахунок кодера каналу
Відповідно до завдання на роботу для забезпечення перешкодостійкості інформації, яка передається каналом зв’язку використовується його перешкодостійке кодування циклічним кодом, який забезпечує виявлення двократних та виправлення однократних помилок. Відомо [5, 7, 8], що перешкодостійкість досягається шляхом введення до повідомлень деякої надмірності, відповідно на першому етапі проектування кодера каналу необхідно визначити тривалість вихідних повідомлень. Для цього скористуємось наступною нерівністю [6]
|
|
де ![]() – кількість
перевірочних розрядів коду;
– кількість
перевірочних розрядів коду;
![]() – кратність помилок, які виправляються;
– кратність помилок, які виправляються;
![]() – загальна кількість
розрядів вихідного повідомлення.
– загальна кількість
розрядів вихідного повідомлення.
Врахувавши, що
кратність помилок, які виправляються ![]() =1 перепишемо вираз (2.13) у наступному
вигляді
=1 перепишемо вираз (2.13) у наступному
вигляді
|
|
Використовуючи вираз (2.14) отримаємо таблицю значень для лівої та правої частини виразу:
|
|
1 | 2 | 3 | 4 | 5 |
|
|
2 | 4 | 8 | 16 | 32 |
|
|
6 | 7 | 8 | 9 | 10 |
З таблиці видно,
що вже при кількості перевірочних символів ![]() виконується нерівність (2.14),
тому кількість символів у перевірочному повідомленні становитиме 7 з них 4
інформаціних та 3 перевірочних.
виконується нерівність (2.14),
тому кількість символів у перевірочному повідомленні становитиме 7 з них 4
інформаціних та 3 перевірочних.
Для реалізації кодера циклічного коду використовуємо ряд правил [7]. Для вибору тівірного поліному використовуємо таблицю незвідних багаточленів серед яких обираємо поліном третього степеню (відповідно до кількості перевірочних розрядів вихідного повідомлення).
|
|
(2.15) |
Формуємо твірну
матрицю. Для цього визначаємо під матрицю, яка задає правило формування
перевірочних символів. Для цього проводимо ділення одночленів ![]() ,
, ![]() ,
, ![]() та
та ![]() на твірний багаточлен:
на твірний багаточлен:
|
|
|
|
|||||||||
|
|
|
|
|||||||||
|
|
|
||||||||||
|
|
|
||||||||||
|
|
|
||||||||||
|
|
|
||||||||||
|
|
|
||||||||||
|
|
|
||||||||||
|
|
|
||||||||||
|
|
|||||||||||
|
|
|||||||||||
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
Записуємо залишки від ділення багаточленів у вигляді рядків матриці:
|
|
(2.16) |
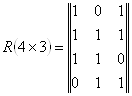 .
.Твірну матрицю формуємо за привилом
|
|
де ![]() – одинична матриця.
– одинична матриця.
Використовуючи правило (2.17), отримаємо матрицю
|
|
(2.18) |
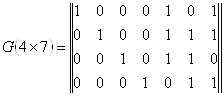 .
.Здійснюємо кодування повідомлення яке відповідає 7-му рівню напруги кодера джерела, для цього використовуємо наступне правило
|
|
Де ![]() – вектор, який містить закодоване
повідомлення;
– вектор, який містить закодоване
повідомлення;
![]() – вектор, який містить інформаційне повідомлення.
– вектор, який містить інформаційне повідомлення.
Вихідною є послідовність 0111:

При цьому перевірочні символи містяться в останніх трьох розрядах вихідного повідомлення, а інформаційні в перших 4-х.
Для апаратної реалізації кодера використовуємо схему з формуванням остачі за 4 такти [7]. Для чого використовуємо 3 Т-тригера (за степенем твірного багаточлена) та 2 суматора, які під’єднуємо до входів тих Т-тригерів, які відповідають членам твірного багаточлена з ненульовим значенням коефіцієнта. В результаті буде отримано схему, яка наведена на рисунку 2.4
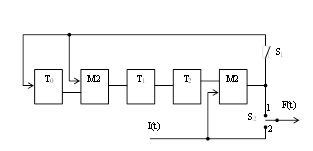
Рисунок 2.4 Функціональна схема кодера каналу
Запишемо у вигляді таблиці стани регістрів зсуву при подачі на вхід повідомлення 0111
| Номер такту | I(t) |
S1 |
S2 |
Регістр зсуву | F(t) | ||
|
Т0 |
Т1 |
Т2 |
|||||
| 1 | 0 | + | 2 | 0 | 0 | 0 | 0 |
| 2 | 1 | + | 2 | 1 | 1 | 0 | 1 |
| 3 | 1 | + | 2 | 1 | 0 | 1 | 1 |
| 4 | 1 | + | 2 | 0 | 1 | 0 | 1 |
| 5 | * | - | 1 | * | 0 | 1 | 0 |
| 6 | * | - | 1 | * | * | 0 | 1 |
| 7 | * | - | 1 | * | * | * | 0 |
Таким чином, таблиця станів свідчить про формування на виході кодера послідовності, яка отримана за правилом (2.19), що свідчить про працездатність запропонованого кодера.
Надмірність коду становить:
|
|
врахувавши
розрахункові дані, отримуємо ![]() 0,428.
0,428.
Таким чином, в даному пункті наведено варіант побудови кодера каналу, який забезпечує формування 7-розрядного перешкодостійкого циклічного коду із виявленням двократних та виправленням однократних помилок.
2.4 Розрахунок модулятора
Для передачі
сигналу використовується відносна фазова модуляція при цьому несуча частота
становить ![]() ,
а амплітуда сигналу становить 1 В.
,
а амплітуда сигналу становить 1 В.
Аналітичний запис сигналу має вигляд:
|
|
Де ![]() – символ двійкової послідовності,
яка передається (має значення 0 або 1);
– символ двійкової послідовності,
яка передається (має значення 0 або 1);
Запис (2.21) характеризує когерентну фазову модуляцію, яка вимагає узгодження приймальної та передавальної частини за фазою сигналів. Що вимагає досить складних пристроїв синхронізації. З метою спрощення схем приймачів та можливості використання некогерентного методу демодуляції використовується відносна фазова маніпуляція суть якої полягає у зміні фази на 180 градусів лише при передачі 1. З метою цього вхідна послідовність кодується за правилом
|
|
Застосовуючи вказане правило до послідовності на виході кодера каналу отримаємо послідовність
![]()
Та, використовуючи математичну модель (2.20), отримуємо графік сигналу на виході модулятора:
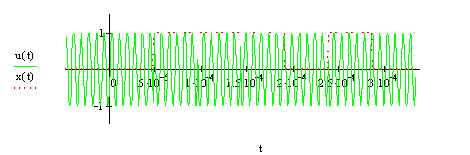
Рисунок 2.5 Графік вихідного сигналу модулятора.
З рисунку 2.5 видно, що при передачі 1 відбувається зміна фази на 180 градусів, а при передачі 0 фаза сигналу залишається незмінною.
Тривалість дискрети на виході кодера каналу можна розрахувати за виразом
|
|
(2.23) |
Провівши розрахунок, отримаємо 4,76х10-5 с.
Для визначення автокореляційної функції сигналу скористаємось тією особливістю, що автокореляційна функці прямокутного відеоімпульсу має трикутну форму, а послідовності відео імпульсів – пелюсткову форму з трикутними пелюстками [1]. Загалом, в процесі вимірювання параметрів сигналу, або його розпізнавання не важливо, яку форму мають пелюстки АКФ, а важливо знати лише їх відносний рівень. Тому для визначення АКФ модулюючого сигналу скористуємось його записом у дискретній формі. При цьому будемо вважати, що рівень 1 відповідає значенню +1, а рівень 0 – -1. В такому випадку запис сигналу матиме вигляд
![]()
В такому випадку АКФ можливо знайти замінивши операцію згортування на операцію додавання зсунутих послідовностей. Це можливо здійснити за виразом
|
|
(2.24) |
Графік авто кореляційної функції, яку побудовано за результатами розрахунків наведено на рисунку 2.6
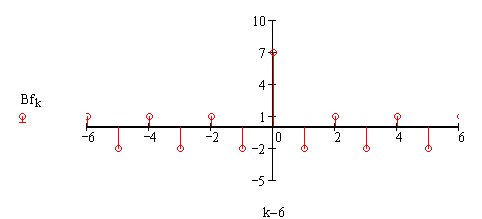
Рисунок 2.6 Автокореляціна функція модулюючого сигналу
З рисунку 2.6
видно, що АКФ сигналу має максимум при ![]() та досить низький рівень бічних
пелюсток, що пов’язано із слабкою кореляцією сигналу.
та досить низький рівень бічних
пелюсток, що пов’язано із слабкою кореляцією сигналу.
Відповідно до виразу (2.21) в модуляторі необхідно забезпечити формування сигналу фаза якого змінюється залежно від вхідної послідовності. Функціональна схема модулятора наведена на рисунку 2.7.
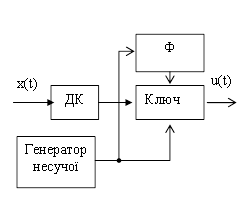
Рисунок 2.7 Функціональна схема модулятора
Як видно з рисунка 2.7 на вхід модулятора поступає сигнал у вигляді послідовності відео імпульсів, яка відповідає повідомленню, що передається. В диференційному кодері здійснюється попереднє кодування вхідної послідовності за правилом (2.22). Залежно від символу вхідної послідовності на вихід модулятора буде передаватися або сигнал з виходу генератора несучої або сигнал фаза якого за допомогою фазообертача (Ф) змінюється на 180 градусів.
В загальному вигляді, вираз для сигналу з кутовою модуляцією має вигляд:
|
|
(2.25) |
де ![]() – циклічна частота
модулюючого сигналу:
– циклічна частота
модулюючого сигналу:
|
|
(2.26) |
![]() – циклічна частота
несучого коливання:
– циклічна частота
несучого коливання:
|
|
(2.27) |
Здійснимо перетворення вказаного виразу:
|
|
З теорії функцій Бесселя відомо, що:
|
|
(2.28) |
|
|
де ![]() – функція Бесселя І
роду з аргументом
– функція Бесселя І
роду з аргументом ![]() .
.
Якщо врахувати ![]() , а
, а ![]() , можна
отримати вираз для вхідного сигналу:
, можна
отримати вираз для вхідного сигналу:
|
|
(2.29) |



Для ФМ-сигналу індекс модуляції становить
|
|
(2.30) |
де K – коефіцієнт пропорційності, який для ВФМ становить 3,14
Ефективна ширина спектру сигналу становить:
|
|
Оскільки
максимальний порядок функції Бесселя, відповідно до виразу (2.31) становить 4
то в ефективній ширині спектру перебуває 9 гармонік сигналу на частотах ![]() ,
, ![]() ,…
,… ![]() .
.
Розрахунок амплітуд гармонік сигналу проводимо з використаннм ПЕОМ. Розрахунок гармонік сигналу проводимо за виразом:
|
|
(2.32) |
Графік спектру вихідного сигналу наведено на рисунку 2.8.
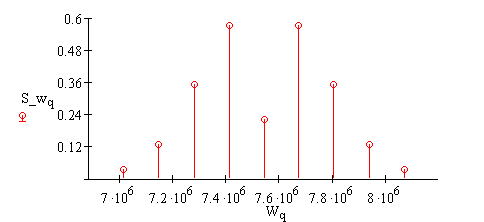
Рисунок 2.8 Спектр вихідного сигналу модулятора.
2.5 Розрахунок каналу зв’язку
Передача сигналу
здійснюється по каналу з постійними параметрами та адитивним гаусовим шумом,
який має рівномірний енергетичний спектр, спектральна щільність якого становить
![]() 1,3х10-7
В2/Гц.
1,3х10-7
В2/Гц.
Визначаємо потужність шуму на виході каналу зв’язку:
|
|
(2.33) |
Підставивши
відповідні значення отримаємо ![]() 0,022 В2
0,022 В2
В найпростішому випадку потужність сигналу можна оцінити за виразом
|
|
(2.34) |
Відношення сигнал/шум розраховуємо за виразом:
|
|
(2.35) |
З урахуванням відомих значень воно становить 16,7 дБ.
В такому випадку перепускна здатність каналу в умовах перешкод може бути визначена за виразом
|
|
(2.36) |
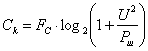 ,
,що після проведення розрахунків становить 8,3 кбіт/с
Визначаємо ефективність використання пропускної здатності каналу:
|
|
(2.37) |
підставивши відповідні значення, отримаємо 1,442
2.6 Розрахунок демодулятора
В демодуляторі здійснюється некогерентна обробка прийнятого ВФМ-сигналу. Це вимагає використовувати для демодуляції пристрій функціональна схема якого наведена на рисунку 2.9
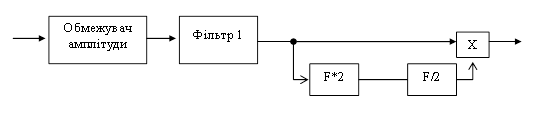
Рисунок 2.9 Функціональна схема оптимального демодулятора для ВФМ
Принцип роботи наведеного на рисунку 2.9 пристрою полягає в наступному. В пристрої реалізовується перемноження вхідного сигналу з сигналом, який являє собою відновлений сигнал генератора несучої передавальної частини. Відновлення несучої досягається шляхом використання схеми Пістолькорса, а саме: помноженням частоти на 2, що дозволяє уникнути стрибків фази на 180 градусів та наступним її діленням.
Ймовірність помилки прийнятого сигналу становить [8]
|
|
(2.38) |
що становить 0,2х10-9
Таким чином, у даному пункті розраховано характеристики демодулятора сигналу з фазовою маніпуляцією та запропоновано йог функціональну схему. Визначено, що ймовірність помилки прийнятого символу залежить від відношення сигнал/шум, відповідно для забезпечення збільшення ймовірності правильного прийому інформації необхідно забезпечити збільшення енергії сигналу.
2.7 Розрахунок декодера каналу
Для виправлення помилок в процесі прийому повідомлень, які закодовані перешкодостійким циклічним кодом використовується їх властивість, що кожну дозволену комбінацію коду можливо утворити шляхом циклічного зсуву іншої дозволеної комбінації [7].
Справді, ми
отримали кодову комбінацію для числа 0111, яка має вигляд 0111010, здійснивши
її зсув вправо на 1 символ, отримаємо кодову комбінацію 0011101, яку можна
описати поліномом ![]() . Здійснимо її ділення на твірний
багаточлен, отримаємо:
. Здійснимо її ділення на твірний
багаточлен, отримаємо:
|
|
|
||||
|
|
|
||||
|
|
|||||
|
|
|||||
| 0 | |||||
Як видно з результатів ділення, залишок дорівнює 0, що свідчить про правильний прийом повідомлення. Якщо врахувати, що в перших чотирьох розрядах повідомлення містяться інформаційні розряди, то вказана послідовність відповідає повідомленню 0011. Здійснивши кодування повідомлення 1001 за правилом (2.19), отримаємо
 ,
,
що відповідає послідовності для повідомлення 0111 зсунутій вправо на 2 розряди.
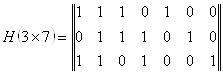
При виникненні помилки в першому розряді повідомлення воно матиме вигляд 1111010, здійснимо перевірку, для чого використаємо перевірочну матрицю
|
|
(2.39) |
|
|
(2.40) |
 .
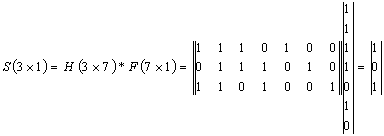
.В такому випадку синдром помилки можна розрахувати за правилом
|
|
(2.41) |
Здійснюємо розрахунок
Можна припустити, що й для інших повідомлень помилка в першому розряді буде призводити до такого ж залишку. Це дає можливість виправляти помилку в повідомленні шляхом циклічного зсуву його вліво до того моменту поки залишок від ділення не стане рівним 101, що буде свідчити про помилку в першому розряді, що можна усунути шляхом його інвертування з наступним циклічним зсувом повідомлення вправо на стільки ж тактів наскільки воно було зсунуте вліво.
Нехай помилка виникла в 6-му розряді. Повідомлення має вигляд 0111000. Подамо процес виправлення помилки у вигляді таблиці
| Номер такту зсуву | Повідомлення | Синдром |
| 0 | 0111000 | 010 |
| 1 | 1110000 | 100 |
| 2 | 1100001 | 011 |
| 3 | 1000011 | 110 |
| 4 | 0000111 | 111 |
| 5 | 0001110 | 101 |
Як бачимо з таблиці, після пятого зсуву отримано синдром, який свідчить про помилку у першому розряді повідомлення. При цьому варто відмітити, що кожний наступний синдром можна утворити шляхом подання у схему ділення старшого розряду попереднього синдрому. Тобто можна не використовувати додатковий регістр пам’яті, а забезпечити замикання виходу схеми ділення на її вхід та послідовну видачу з виходу регістру зсуву вхідного повідомлення. Через два такти, на виході схеми ділення зявиться виділений залишок, який буде свідчити про видачу з виходу буферного елементу спотвореного розряду. Функціональна схема декодера наведена на рисунку 2.10
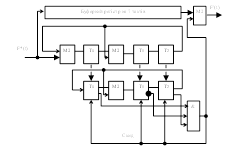
Рисунок 2.9 Функціональна схема декодера
Роботу декодера можна пояснити записавши стани тригерів у вигляді таблиці.
| Номер такту | F*(t) | Регістр зсуву першої схеми ділення | Регістр зсуву другої ділення | Детектор залишку | F’(t) | ||||
|
Т0 |
Т1 |
Т2 |
Т0 |
Т1 |
Т2 |
||||
| 1 | 0 | 0 | * | * | * | * | * | 0 | * |
| 2 | 1 | 1 | 0 | * | * | * | * | 0 | * |
| 3 | 1 | 1 | 1 | 0 | * | * | * | 0 | * |
| 4 | 1 | 1 | 1 | 1 | * | * | * | 0 | * |
| 5 | 0 | 1 | 0 | 1 | * | * | * | 0 | * |
| 6 | 0 | 1 | 0 | 0 | * | * | * | 0 | * |
| 7 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 0 |
| 8 | * | * | * | 0 | 0 | 1 | 0 | 1 | |
| 9 | * | * | * | 1 | 1 | 0 | 0 | 1 | |
| 10 | * | * | * | 0 | 1 | 1 | 0 | 1 | |
| 11 | * | * | * | 1 | 1 | 1 | 0 | 0 | |
| 12 | * | * | * | 1 | 0 | 1 | 1 | 1 | |
| 13 | * | * | * | 0 | 0 | 0 | 0 | 0 | |
Як видно з таблиці, під час 12 такту схема ділення формує виділений залишок, який забезпечує інвертування розряду на виході буферного елементу, що забезпечує виправлення шостого розряду повідомлення
Запропонований декодер дозволяє виявляти двократні помилки, відповідно не виявлення помилки буде відбуватися при кратності помилок >2. В такому випадку ймовірність не виявлення помилки можливо розрахувати за виразом
|
|
(2.42) |
де ![]() – ймовірність помилки
кратності
– ймовірність помилки
кратності ![]() :
:
|
|
(2.43) |
де ![]() ймовірність однократної
помилки, яка отримана при розрахунку демодулятора;
ймовірність однократної
помилки, яка отримана при розрахунку демодулятора;
![]() – коефіцієнт не виявлення
помилок, який з урахуванням кількості символів у кодовій комбінації та
кількості перевірочних символів становить 0,132
– коефіцієнт не виявлення
помилок, який з урахуванням кількості символів у кодовій комбінації та
кількості перевірочних символів становить 0,132
З використанням ПЕОМ отримуємо значення ймовірності не виявлення помилки, яка становить 0,7х10-30, що на 19 порядків менше за ймовірність помилки прийому одного символу при демодуляції.
Таким чином, використання перешкодо захищеного кодування дозволяє здійснити виявлення та виправлення помилок при передачі повідомлень каналом зв’язку при цьому для кожного конкретного коду можливо значно зменшити ймовірність не виявлення помилки у прийнятому повідомленні.
Висновки
Таким чином, в даній курсовій роботі здійснено розробку варіанту побудови системи передачі даних.
Система забезпечує отримання повідомлення від аналогового джерела, його квантування за рівнем, з використанням 4-розрядного АЦП. З метою зменшення ймовірності помилки при прийомі сигналу використовується перешкодостійке кодування з використанням циклічного коду. В роботі запропоновано використовувати код з можливістю виявлення 2-кратних та виправлення 1-кратних помилок. Використання перешкодостійкого кодування вимагає певної надмірності коду, яка становить 0,428 та більшої пропускної здатності каналу зв’язку, але при цьому спостерігається зменшення ймовірності помилки на вході користувача повідомлень майже у 1019 разів, порівняно з ймовірністю неправильного прийому символу при демодуляції.
При передачі інформації використовується фазова модуляція, яка забезпечує досить малу ймовірність помилки прийому символу повідомлення. При цьому доведено, що вказана ймовірність залежить від відношення сигнал/шум.
З метою полегшення розрахунків використовувалося середовище MathCad, та Maple.
Список використаних джерел
1. Баскаков С. И.. Радиотехнические цепи и сигналы: Учеб. Для вузов по спец. «Радиотехника» / С. И. Баскаков / М.: Высш. Шк.., 1988 – 488 с.
3. Костин В. Н. Статистические методы и модели: Учебное пособие. / В. Н. Костин, Н. А. Тишина // Оренбург: ГОУ ОГУ, 2004. – 138 с.
8. Cкляр Б. Цифровая связь. Теоретические основы и практическое применение. 2-е издание.: Пер с англ. – М.: Издательский дом «Вильямс». 2003, 1104 с.
Перепечатка материалов без ссылки на наш сайт запрещена