Реферат: Диагностирование асинхронных электродвигателей
Реферат: Диагностирование асинхронных электродвигателей
Диагностирование асинхронных электродвигателей
Комплексный метод диагностики асинхронных электродвигателей на основе использования искусственных нейронных сетей
В настоящее время асинхронные электродвигатели являются потребителями более 70% всей электроэнергии в стране. Опыт эксплуатации электродвигателей свидетельствует о большом количестве отказов, происходящих по причине аварийных ситуаций. Аварийность ежегодно составляет 25% и более /1/. Выход из строя электродвигателя наносит большой ущерб. В основном этот ущерб связан с простоем технологического оборудования или порчи продукции вследствие аварии двигателя. Дополнительно к убыткам добавляется снижение электро- и пожаробезопасности, связанное с возможными короткими замыканиями которые могут присутствовать в обмотке статора или ротора поврежденного электродвигателя.
Общепринятые средства защиты не обеспечивают сохранность электродвигателя и снижают вероятность возникновения лишь некоторых из вышеперечисленных случаев. Поэтому возникает потребность диагностики состояния электродвигателя в процессе его работы, т.е. функциональной диагностики. Обнаружение дефектов в работающем электродвигателе на ранней стадии их развития не только предупредит внезапную остановку производства в результате аварии, но и значительно снизит расходы на ремонт электродвигателя и увеличит срок его службы. Кроме этого, в настоящее время достаточно актуально применение адаптивных устройств защиты и диагностики, позволяющих выполнять диагностику электродвигателей независимо от их мощности и конструкции.
Современные системы и методы диагностики электрооборудования можно разделить на две группы.
К первой группе относятся методы тестовой диагностики, требующие формирования искусственных возмущений, воздействующих на изучаемый объект: измерение сопротивления изоляции, токов утечки, внутреннего сопротивления обмоток, тангенса угла диэлектрических потерь обмоток, метод высоковольтного импульса и др.
Вторая группа включает в себя методы оперативной или функциональной диагностики, используемые в первую очередь для электрооборудования, являющегося источником естественных возмущений в процессе работы /2/.
Кроме этого каждая группа делится на две других - это методы, позволяющие выявить неисправность электрооборудования в целом и методы, выявляющие и локализующие конкретную неисправность или дефект в электрооборудовании.
В настоящее время тестовое диагностирование - основной вид выявления дефектов электрооборудования в отечественной энергетике. Оно определило сложившуюся структуру технического обслуживания и ремонта по регламенту /3/. Однако такая диагностика способствует не только предупреждению развития различных дефектов, но и их появлению. Например, при проведении плановых ремонтов электрических машин, после полной сборки двигатель подвергается высоковольтным испытаниям, которые оказывают на изоляцию машины пагубное влияние, вызывая появление в обмотке микродефектов, развивающихся в процессе работы электромашины под влиянием неблагоприятных факторов: некачественной электроэнергии, перегрузок, частых пусков и остановок. С каждым высоковольтным испытанием при планово-предупредительных ремонтах число дефектов увеличивается, что в конечном итоге приводит к аварийному выходу из строя электрического двигателя. Кроме того, каждая разборка и сборка электродвигателя увеличивает эти микродефекты /3/. Например, компанией Baker недавно была разработана многофункциональная система диагностики изоляции электрических машин AWA IV посредством высоковольтного импульсного испытания /4/. И хотя, авторы этой системы утверждают, что AWA IV выполняет неразрушающий тест изоляции, объясняя это своевременной остановкой теста, все равно тест прекращается только после превышения пределов прочности изоляции.
Среди других недостатков тестовой диагностики можно отметить также временную приостановку работы проверяемого оборудования, отсутствие возможности защитного отключения оборудования во время его работы для предотвращения полного выхода его из строя, отсутствие контроля ненормальных режимов работы данного оборудования и т.д.
Для перехода с обслуживания и ремонта по регламенту на ремонт и обслуживание по фактическому состоянию необходима тщательная диагностика электрооборудования, причем, чтобы подготовиться к ремонту, желательно обнаружить все дефекты, влияющие на ресурс, задолго до отказа. По этим причинам необходимо применение методов диагностики не только относящихся к категории функциональных, но и позволяющих выявить дефект конкретной части электрооборудования. К тому же методы функциональной диагностики экономически наиболее предпочтительны, так как не требуют даже временного вывода электрооборудования из эксплуатации.
Для диагностики асинхронных электродвигателей в оперативном режиме в настоящее время используются несколько способов диагностики, среди которых наиболее распространен метод виброакустической диагностики . В этом направлении активно проводятся исследования и разработки научно исследовательскими институтами Военно-промышленного комплекса Санкт-Петербурга, которые были объединены в акционерное общество "Технические Системы и Технологии". Главным недостатком такого метода является необходимость использования специальных виброакустических датчиков и сложность их установки. Специалистами Московского Центра электромагнитной безопасности был разработан метод спектрального анализа потребляемого тока . Достоинство этого метода по сравнению с предыдущим - возможность контроля состояния как механических, так и электрических частей электродвигателей по электрическому параметру, а в частности, по сигналу потребляемого тока, что значительно упрощает установку схемы для диагностики и избавляет от необходимости введения специальных датчиков. Особенно подобные методы распространены за рубежом . Суть данного метода заключается в анализе спектра гармоник тока потребляемого электродвигателем, путем выявления периодически повторяющихся изменений сигнала на графике, соответствующих конкретному виду повреждения электродвигателя. Однако из-за появлений ложных гармоник сигнала при различных помехах электрической сети, с подключенной к ней электродвигателем, возможны неверные результаты диагностики. В дополнение к этому неизвестно каким будет график спектрального анализа тока при нестабильном напряжении в сети.
Современные электротехнические средства, базирующиеся на использовании программируемых микроконтроллеров, позволяют наиболее гибко реализовать защиту и функциональную диагностику электродвигателей, по их электрическим параметрам.
Наиболее удачным методом является использование программно-аппаратного комплекса, который изображен на рис. 1, состоящего из компьютера и цифрового устройства-посредника, производящего необходимые измерения и передаваемого их в компьютер. В качестве измеряемых электрических величин могут быть оперативный ток, потребляемая мощность и т.д. Программа, выполняемая на компьютере, должна, в свою очередь, определенным образом обработать входную информацию и определить наиболее вероятный вид повреждения работающего электродвигателя или сделать заключение об его исправности. Этот метод наиболее эффективен, так как позволяет хранить на компьютере большие базы данных с информацией об отслеживаемой динамике повреждений электродвигателя с последующим прогнозированием выхода его из строя.
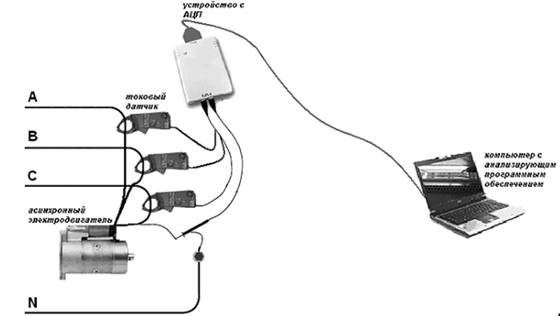
Рис. 1. Диагностический программно-аппаратный комплекс
Кроме этого, компьютер является более мощным средством обработки информации, чем микроконтроллер, что, в частности, позволяет использовать современные технологии, в том числе и технологии искусственного интеллекта, такие как использование искусственных нейронных сетей, нечеткой логики и экспертных систем.
Известно, что магнитное поле вращающегося ротора работающего асинхронного электродвигателя воздействует на магнитное поле его статорной обмотки, что приводит к периодическим колебаниям электрических величин электродвигателя, таких как потребляемый ток, мощность или напряжение обмотки статора. Период данных колебаний пропорционален, частоте вращения ротора. Таким образом, анализируя форму графика сигнала какой-либо из электрических величин на данном периоде можно обнаружить повреждение в электромеханической части электродвигателя и распознать его вид. Для решения данной проблемы можно использовать много различных подходов. Например, можно построить аппроксимационную функцию по нескольким исходным точкам сигнала, соответствующего конкретному виду повреждения, и в процессе диагностики сравнивать текущие измеряемые значения со значениями данной функции с определенной долей погрешности. Однако аппроксимация сложных нелинейных сигналов приводит к большим погрешностям, которые усугубляются дополнительными помехами электрической сети с подключенным электродвигателем. В настоящее время широкое распространение получило использование искусственных нейронных сетей для построения математических моделей сложных нелинейных процессов, распознавания образов и прогнозирования сигналов.
Нейронная сеть - это набор нейронов, каждый из которых представляет собой модель биологического нейрона, изображенного на рис. 2. Каждый нейрон имеет так называемые дендриты, синапсы и аксоны. Дендриты идут от тела нервной клетки к другим нейронам, где они принимают сигналы в точках соединения, называемых синапсами. Принятые синапсом входные сигналы подводятся к телу нейрона. Здесь они суммируются, причем одни входы стремятся возбудить нейрон, другие - воспрепятствовать его возбуждению. Когда суммарное возбуждение в теле нейрона превышает некоторый порог, нейрон возбуждается, посылая по аксону сигнал другим нейронам. У этой основной функциональной схемы много усложнений и исключений, тем не менее, большинство искусственных нейронных сетей моделируют лишь эти простые свойства .
В настоящее время широко используются математические модели нейронных сетей. Существуют также и другие модели нейронных сетей, среди которых наиболее часто используются рекуррентные сети Хопфилда и самоорганизующиеся сети Кохонена . Прямоугольники представляют собой тела нейронов, исходящие и входящие стрелки - дендриты, а точки, в которых стрелки заходят и точки, из которых стрелки исходят - это соответственно синапсы и аксоны. Круги на рисунке - условные входа нейронов, которые просто распределяют входящие значения по всем нейронам сети. В математической модели нейрона все входящие стрелки имеют веса, а на выходе обычно вычисляется нелинейная функция от средней суммы этих весов с некоторыми дополнительными арифметическими действиями.
Были разработаны также и другие модели нейронов и нейронных сетей, например, электрические. Однако из-за своей непрактичности они не получили большого распространения.
Для использования нейронной сети прямого распространения при решении конкретной задачи, ее необходимо сначала "обучить". Для этого на вход нейронной сети подаются какие-либо значения, а на выходе снимаются результирующие значения, которые сравниваются с теми значениями, которые должны там быть. Если выходные значения нейронной сети отличаются от требуемых значений, то происходит оптимизация весов нейронной сети каким-либо из математических алгоритмов до тех пор, пока эти значения не будут им соответствовать с заданной точностью. После этого нейронную сеть можно считать обученной.
Нейронные сети дают возможность эффективно определять причину и виды повреждения асинхронных электродвигателей, работать с зашумленными данными, избавляя от необходимости применения промежуточных электронных фильтров от помех или фильтрации математическими методами, а также адаптироваться к конкретному типу электродвигателя. Кроме этого, искусственные нейронные сети широко используются в задачах прогнозирования .
Помимо выбора алгоритмов обработки сигнала и определения способа диагностики асинхронных электродвигателей необходимо разработать аппаратную часть программно-аппаратного диагностического комплекса. При этом очень важно выбрать недорогую компонентную базу для его реализации, определяющую себестоимость комплекса в размере не более чем 10% от стоимости самого электродвигателя.
В настоящее время на кафедре Электроснабжения Читинского государственного университета ведутся разработки данного программно-аппаратного комплекса. В реализации программной части комплекса используется метод анализа сигнала полной потребляемой мощности электродвигателя на каждой фазе искусственной нейронной сетью, определяющий вероятность присутствия какого-либо повреждения, как в электрической, так и в механической части электродвигателя. Для этого нейронную сеть прямого распространения планируется использовать для идентификации зависимости полной мощности от времени, либо для идентификации спектра гармоник сигнала полной потребляемой мощности на одном периоде. Сначала выполняется определение периода сигнала. Затем отрезок, на котором сигнал длится в течение предварительно определенного периода, масштабируется по ширине, а значения амплитуды полной мощности нормируются относительно значения номинальной мощности электродвигателя. Таким образом, будут анализироваться процентные изменения мощности. Для их анализа полученный график разбивается на равномерные промежутки, количество которых зависит от быстродействия измерительного устройства и частоты вращения ротора электродвигателя.
При обучении нейронной сети на выходе используется определенное значение Yэт, соответствующее конкретному виду неисправности электродвигателя и эталонные экспериментальные значения сигнала полной потребляемой мощности опытного электродвигателя, полученные при помощи того же измерительного устройства. После этого, при идентификации сигнала, уже обученной сетью, производится проверка соответствия значения Y на выходе сети значению Yэт, которое задавалось при обучении. Если Y=Yэт, то это означает, что в электродвигателе на 100% имеется неисправность, для которой обучалась данная нейронная сеть. В качестве обнаруженной неисправности выбирается та, степень соответствия которой наибольшая. По степени соответствия для других неисправностей электродвигателя можно судить о вероятности их присутствия. В наиболее сложных случаях, возможно, придется использовать экспертную систему с набором правил нечеткой логики, которые будут определяться в ходе экспериментальных исследований.
С помощью нейронной сети планируется также выполнять прогнозирование повреждений в электродвигателе. Аппаратная часть комплекса, структура которой изображена на рис. 2, включает в себя 10 блоков, из которых 7 блоков являются одинаковыми входными блоками, а 3 других блока являются основными.
Главный блок устройства - измерительный - выполняет функции измерения входного сигнала, управление блоком переключения диапазонов и исполнительным блоком, а также обмен информацией между компьютером и устройством. Входные блоки служат для масштабирования входного измеряемого уровня напряжения для его изменения в пределах от 0 до 5 В. Каждый входной блок поддерживает работу в трех диапазонах напряжения (от 0 до 100 В с точностью 0,1 В, от 10 до 1000 В с точностью 1 В и от 100 до 10000 В с точностью 10 В). Для автоматического выбора текущего измеряемого диапазона напряжения используется блок переключения диапазонов, который управляет входными блоками, получая команды на переключение от измерительного блока. Исполнительный блок служит для управления работой электродвигателя или для сигнализации о произошедшей поломке электродвигателя.
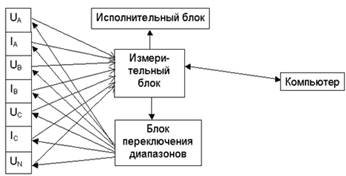
Рис. 2. Структура аппаратной части диагностического комплекса
В качестве основы для реализации измерительного блока, принципиальная схема которого изображена на рис. 3, был выбран недорогой микроконтроллер фирмы ATMEL ATmega8535 RISC-архитектуры со встроенным 8-канальным аналого-цифровым преобразователем (АЦП) /14/. Данный микроконтроллер имеет 512 байт энергонезависимой памяти EEPROM, которую можно использовать для хранения калибровочных коэффициентов и настроек, относящихся к диагностируемому электродвигателю. Микросхема FT245BM используется для связи измерительного блока с компьютером через интерфейс USB 2.0. Однако возникли дополнительные трудности, связанные с низким быстродействием АЦП данного микроконтроллера, в результате чего получается слишком мало экспериментальных значений измеряемой величины на анализируемом периоде сигнала электродвигателя. Можно воспользоваться более мощным и быстрым многоканальным АЦП или несколькими одноканальными АЦП, работающими параллельно, однако оба этих способа значительно завысят себестоимость аппаратной части комплекса. Решением этой проблемы стал программный метод, при помощи которого происходит получение более детального графика сигнала на одном периоде путем анализа сразу нескольких периодов сигнала.
Идея метода изображена на рис. 4. На координатной плоскости рисунка имеются радиус-векторы, вращающиеся с угловой скоростью wt. Длина радиус-вектора равна текущему значению полной потребляемой мощности Pi. Таким образом, текущее состояние сигнала удобно представить в виде комплексного числа i, значение которого можно выразить через формулу Коши-Адамара:
![]() (1)
(1)
где i - точка текущего состояния сигнала полной потребляемой мощности;
Pi - текущее значение полной потребляемой мощности;
wi - текущий угол поворота ротора относительно начального положения.
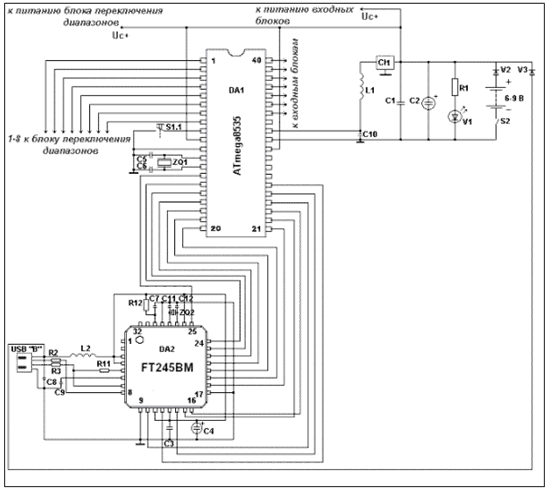
Рис. 3. Структура искусственной нейронной сети, используемой для идентификации сигнала полной потребляемой мощности
Например, сначала происходит измерение трех значений сигнала на первом периоде 1, 2 и 3, затем через некоторое смещение угла относительно w1, соответствующее значению , происходит получение следующих трех значений сигнала 4, 5 и 6 на втором периоде.
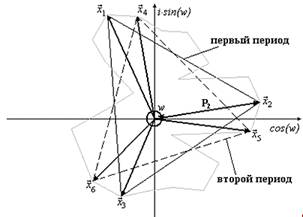
Рис. 4. Детализация графика сигнала полной потребляемой мощности
Аналогичным образом получаются точки для следующих периодов в зависимости от требуемого количества точек сигнала. Соединив полученные точки в порядке, определяемом углом вращения wi, сплошной линией, мы получим более детальный график сигнала, содержащий необходимое число экспериментальных точек. Схематически пример получения детального графика одного периода для сетевого напряжения промышленной частоты 50 Гц показан на рис. 9.
Таким же образом происходит получение графика одного периода полной потребляемой мощности асинхронного электродвигателя. Чем выше скорость вращения ротора электродвигателя, тем больше периодов анализируется, до того, как будет произведена попытка определения неисправности в электродвигателе. Естественно такая обработка сигнала снижает общее быстродействие диагностического комплекса. Можно даже не выполнять идентификацию полученного периода, а свести эту задачу к задаче распознавания образа замкнутой фигуры, изображенной на рис. 10, и по форме данной фигуры судить о присутствии какой-либо неисправности в электродвигателе. В этом случае способ диагностики получается более наглядным, но и более сложным в реализации.
Также изначально планировалось в качестве измерительных датчиков тока использовать токовые клещи с широким диапазоном измерения тока. Это позволило бы разработать универсальный и удобно-подключаемый программно-аппаратный комплекс. Но из-за очень высокой стоимости токовых клещей в аппаратной части комплекса используются обычные трансформаторы тока.
Как показано на рис. 5, для оценки напряжения между фазой C электродвигателя и нейтралью производится измерение разности потенциалов между нейтралью и корпусом устройства UN, а также между фазой и корпусом устройства UC. Затем, получив разность этих двух напряжений, находится значение напряжения между фазой C и нейтралью. Аналогичным образом происходит получение значения напряжения для фаз A и B. Данный механизм измерения используется для того, чтобы убрать гальваническую связь между устройством и цепью электродвигателя.
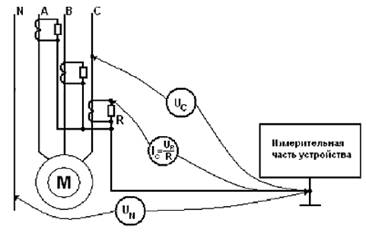
Рис. 5. Схема подключения измерительной части комплекса к цепи электродвигателя
Напряжение с токовых датчиков или с фаз электродвигателя подается на измерительный вход входного блока, изображенного на рис. 6. Входное напряжение подается через один их трех делителей в зависимости от текущего диапазона напряжения. Каждый делитель подключается при помощи реле, после получения соответствующего сигнала на базу одного из трех транзисторов от блока переключения диапазонов. Реле во входном блоке являются герконовыми, так как они потребляют небольшой ток и при этом сравнительно бесшумны. Текущий входной делитель выбирается блоком переключения диапазонов таким образом, чтобы на выходе делителя уровень напряжения был в пределах от -1,25 В до 1,25 В. Но учитывая, что аналого-цифровой преобразователь микроконтроллера выполняет измерение только неотрицательных сигналов от 0 до 2,5 В, дополнительно на выходной сигнал подается постоянное напряжение смещения с интегрального стабилизатора CL1 через делитель R9 и R10, на выходе которого образуется +1,25 В.
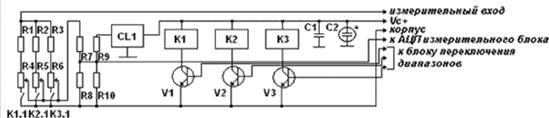
Рис. 6. Принципиальная схема входного блока
Данный программно-аппаратный комплекс позволит значительно увеличить экономическую эффективность использования промышленных установок с асинхронными электродвигателями, и при этом увеличить срок службы электродвигателей в производстве путем проведения своевременного их ремонта по данным прогнозирования, полученным в результате диагностики.
Заключение
В заключение необходимо отметить, что использовать нейронные сети для определения всех видов неисправностей и ненормальных режимов работы электродвигателя нецелесообразно, а в некоторых случаях невозможно! Например, невозможно определить наличие равномерной перегрузки электродвигателя лишь по форме сигнала полной мощности электродвигателя, так как здесь необходимо сравнивать амплитуду мощности электродвигателя с его номинальной мощностью. Однако это легко реализовать в программе. Если программно-аппаратный комплекс будет использоваться не только для диагностики, но и для защиты электродвигателя, то реализация в нем традиционных методов релейной защиты повысит надежность его работы.
В итоге можно сделать вывод, что для создания диагностических устройств и программно-аппаратных комплексов весьма желательно использовать искусственные нейронные сети, так как они являются мощным средством распознавания и прогнозирования сигналов, а их способность к обучению дает возможность разрабатывать адаптивные системы защиты и диагностики электродвигателей.
Список используемой литературы
1. Грундулис, А.О. Защита электродвигателей в сельском хозяйстве [Текст] / А.О. Грундулис // - М.: Колос, 1982. - 140 с.
2. Лукьянов, М.М. Новые принципы виброакустической диагностики изношенного силового электрооборудования [Текст] / М.М. Лукьянов, Э.А. Харисов: Электрика. - № 2, 2001.
3. Еремеев, С.Н. Профилактическое обслуживание электродвигателей высоконагруженного технологического оборудования [Текст] / С.Н. Еремеев: Электрика. - № 3, 2001.
4. Коверженко, Г.Г. Высоковольтные импульсные испытания электрических машин [Текст] / Г.Г. Коверженко: Энергетик. - № 7, 2006.
5. Петухов, В. Диагностика состояния электродвигателей. Метод спектрального анализа потребляемого тока [Текст] / В. Петухов, В. Соколов: Новости электротехники. - № 1, 2005.
12.Круглов, В.В. Искусственные нейронные сети. Теория и практика [Текст] / В.В. Круглов, В.В. Борисов // - М.: Горячая линия. - Телеком, 2002. - 382с.
Перепечатка материалов без ссылки на наш сайт запрещена